Elektronisch steuerbares Frontend für die Qualifizierung von Automotive-Radaren
Das weltweit erste vollständig elektronisch steuerbare Antennenarray.
Das weltweit erste vollständig elektronisch steuerbare Antennenarray.
Ihre Anforderung
Autonomes Fahren (AD) und fortgeschrittene Fahrerassistenzsysteme (ADAS) sind zur Zeit bedeutende Innovationstreiber in der Automobilindustrie. Radarsensoren gehören zu den Schlüsseltechnologien für AD und ADAS und müssen für verschiedene Szenarien getestet werden, z. B. für Fußgänger (Objekte, die vor dem Auto die Straße überqueren), für den Stadtverkehr (Annäherung an ein stehendes oder langsames Fahrzeug) und Überlandfahrten (Szenarien ähnlich dem Stadtverkehr, bei denen die Mittellinie des Testfahrzeugs nicht mit der Mitte des Ziels zusammenfällt).
Um künftig die ADAS-Stufen 4 und 5 zu erreichen, sind Hardware-in-the-Loop-Testszenarien (HIL) und Vehicle-in-the-Loop-Testszenarien (VIL) mit komplexeren Zielsimulationsmöglichkeiten erforderlich. Im Hinblick auf schnellere Validierungsverfahren entsteht auch eine stärkere Nachfrage nach Tischgeräten für die Radarsimulation sowie Funktionstests (Bild 1).

Bild 1: ADAS-Stufen und Automatisierungsgrad: mögliche Fahrzeugkonfigurationen

Bild 2: Entwicklungsprozess für ADAS-Sensoren
Heute nutzen OEMs und Engineering-Dienstleister simulierte Umgebungen mit Software-in-the-Loop-Systemen, um Sensoren und Steuermodule zu testen. Softwaresimulationen sind wertvoll, aber sie können die realen, möglicherweise unvollkommenen Reaktionen der Sensoren nicht nachbilden. Vollständig autonome Fahrzeuge müssen mit solchen Unregelmäßigkeiten umgehen können. Straßentests des integrierten Gesamtsystems in einem Prototyp oder einem Fahrzeug mit Straßenzulassung sind notwendig, damit die OEMs vor der Markteinführung das tatsächliche Endprodukt validieren können. Straßentests sind im Entwicklungsprozess wichtig, jedoch kein Allheilmittel – sie sind nämlich auch teuer, zeitaufwendig und schwer zu reproduzieren.
Weitere Tests sind in der gesamten Wertschöpfungskette der Sensorentwicklung erforderlich, und einfache Anwendungsfälle wie Tests einzelner Radarsensorkomponenten müssen genauso integriert werden wie Tests komplexer Szenarien mit mehreren Sensoren. Ziel ist es, autonome Fahrfunktionen wie adaptive Abstands- und Geschwindigkeitsregelung oder Notbremssysteme unter diversen Laborbedingungen zu testen (siehe Bild 2).
Realistische und reproduzierbare Radarsensortests stellen für die Sensor-Wertschöpfungskette eine Herausforderung dar:
1) Reduzierung des Sensor-Grundrauschens sowie Unterdrückung von Zielen im Nahbereich und möglichen Mehrwegereflexionen.
Lösung von Rohde & Schwarz
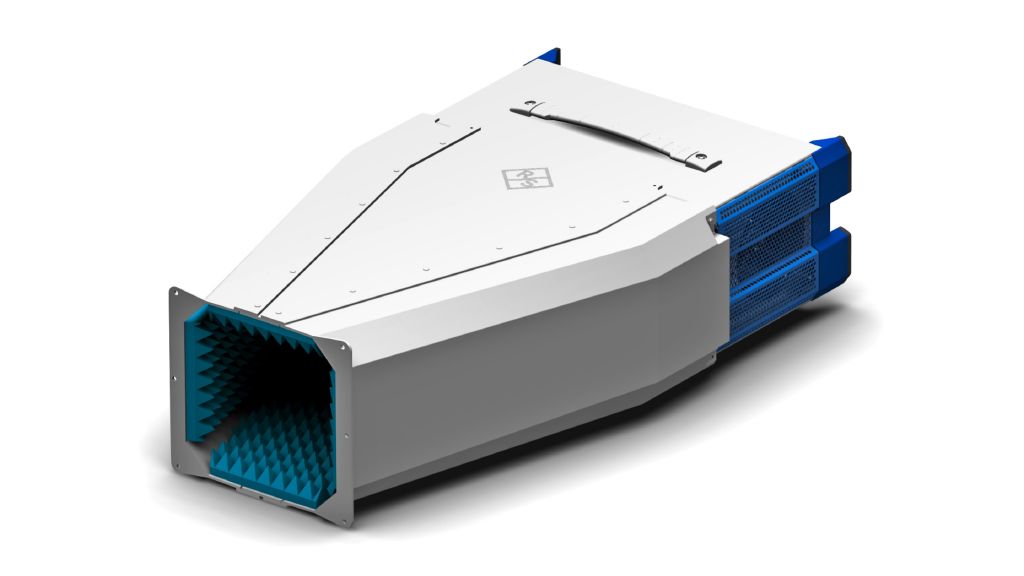
Aktuelle Zielsimulatoren verwenden Hornantennen als Frontends, wobei jeder Punkt Radarsensoren anvisiert und horizontale sowie vertikale Positionen emuliert, indem die Antenne mechanisch bewegt wird. Die mechanische Automatisierung verlängert die Testzeiten insgesamt. Jede Antennenbewegung ändert auch den Einstrahlwinkel (Angle of Arrival, AoA) des Echos, was zu Fehlern und einem Genauigkeitsverlust bei der Darstellung von Zielen führt, wenn die Antennen nicht neu berechnet oder kalibriert werden.
Um die derzeitigen Systembeschränkungen zu überwinden und der wachsenden Bedeutung von HIL und VIL gerecht zu werden, hat Rohde & Schwarz das R&S®QAT100 Advanced Antenna Array entwickelt – das weltweit erste elektronisch steuerbare Antennenarray. Das R&S®QAT100 simuliert Azimut und Elevation durch Aktivierung kleiner Flachantennen. Die Umschaltzeit zwischen den Antennen beträgt etwa 2 ms, sodass auch schnelle azimutale Ziele simuliert werden können (z. B. Querverkehr an einer Kreuzung oder Überholszenarien).
Übersicht über Radarsensoren


OTA-Radarstimulation in Elevation und Azimut ohne physische Bewegung der Antennen
Saubere HF: keine Reflexionen von FE
Die PCB-Antennen weisen einen deutlich geringeren RCS auf als die Standard-Gain-Hörner, die in anderen Systemen eingesetzt werden. Das R&S®QAT-B50 Abschirmsystem sorgt für eine geschirmte HF-Umgebung.
Skalierbare Lösung
Mehrere Frontends können kombiniert werden, um eine Radarumgebung von bis zu 360° zu simulieren:
Unempfindlich gegen Vibrationen: perfekt geeignet für die Montage auf dem VIL-Prüfstand
1) Sichtfeld (Field of View).
Anwendungsfälle
Der modulare Aufbau des R&S®QAT100 erlaubt die Nutzung zur Radarzielsimulation in verschiedenen Anwendungen.
Komponenten- oder Funktionstests
Sehr einfache Anwendungsfälle sind beispielsweise Komponententests für einzelne Radarsensoren. Es wird getestet, ob ein Radarsensor ein Echo richtig erkennt und zwischen zwei Zielen in einer bestimmten Entfernung oder bei einem bestimmten Winkel unterscheidet, sowie die Winkelauflösung des Radarsensors bestimmt.
Szenariotests
Zu den sekundären Anwendungsfällen gehören Tests von Szenarien, z. B. Verkehrsszenarien mit mehreren Fahrzeugen, Notbremssystemen oder adaptiver Abstands- und Geschwindigkeitsregelung. Ziel ist es, bewegliche Ziele in Azimut, Reichweite, Radialgeschwindigkeit und Zielgröße zu simulieren. Je nach Szenario können ein oder mehrere Sensoren simuliert werden.


Das R&S®QAT100 bietet die Flexibilität und Leistungsfähigkeit, um den gesamten Entwicklungsprozess von Radarsensoren zu unterstützen.
Das R&S®QAT100 eignet sich gleichermaßen als Standalone-Gerät für die Performance-Bewertung von Radarsensoren in der Frühphase mittels klassischer Benchtop-Aufbauten und für HIL- und VIL-Anwendungen (mit Zielsimulator als Backend) auf Radarsensor-Modulebene, wenn ein Sensor an die OEM-Spezifikationen angepasst wird (Bild 6).

Das R&S®QAT-B11 Standard-Frontend verfügt über 96 Sende- und 5 Empfangsantennen, aufgeteilt in 4 unabhängige Segmente. Die Konfiguration entspricht den Anforderungen der SIMO-Sensoren. Das R&S®QAT100 kann je nach Bedarf im Linienmodus oder im Segmentmodus betrieben werden. Im Segmentmodus wird jede Linie in vier Segmente unterteilt, die jeweils einen eigenen HF-Anschluss besitzen und bis zu vier Ziele aus verschiedenen Richtungen simulieren können. Das R&S®QAT-B11 kann mit einer zusätzlichen TX/RX-Linie (R&S®QAT-B2) um weitere 96 Sende- und 5 Empfangsantennen erweitert werden, um bis zu 8 Ziele aus verschiedenen Richtungen oder zwei Objekte über das gesamte Array zu simulieren.
Aufgrund des größeren Abstands zwischen den RX- und TX-Antennen erfüllt das R&S®QAT-B11 die MIMO-Anforderungen nicht vollständig, da es bei verschiedenen Winkeln einen Sprung aufweisen kann. Das R&S®QAT-B21 Single-Line-MIMO-Frontend verfügt über eine Linie von Empfangs- und eine Linie von Sendeantennen. Jede Sendeantenne ist mit einer Empfangsantenne gepaart, um die MIMO-Anforderungen zu erfüllen. So stehen 96 Empfangs- und 96 Sendeantennen zur Verfügung, um Phasenfehler zu minimieren und eine einfache Validierung von MIMO-Radargeräten mit verbesserter räumlicher Echoauflösung in drei Dimensionen zu ermöglichen.
Die einzelnen Antennen haben einen Abstand von 3,7 mm, während die Gesamtbreite der Einheit 351 mm beträgt. Der Aufbau kann an den Sensor angepasst werden. Das R&S®QAT100 ist für typische ADAS-Radar-Sendeleistungen ausgelegt.
Das Sichtfeld (FOV) und die erreichbare Winkelauflösung für das R&S®QAT100 hängen vom Aufbau ab und werden wie folgt berechnet:


Autonomes Fahren (AD) und fortgeschrittene Fahrerassistenzsysteme (ADAS) sind zur Zeit bedeutende Innovationstreiber in der Automobilindustrie. Radarsensoren gehören zu den Schlüsseltechnologien für AD und ADAS und müssen für verschiedene Szenarien getestet werden, z. B. für Fußgänger (Objekte, die vor dem Auto die Straße überqueren), für den Stadtverkehr (Annäherung an ein stehendes oder langsames Fahrzeug) und Überlandfahrten (Szenarien ähnlich dem Stadtverkehr, bei denen die Mittellinie des Testfahrzeugs nicht mit der Mitte des Ziels zusammenfällt).
Um künftig die ADAS-Stufen 4 und 5 zu erreichen, sind Hardware-in-the-Loop-Testszenarien (HIL) und Vehicle-in-the-Loop-Testszenarien (VIL) mit komplexeren Zielsimulationsmöglichkeiten erforderlich. Im Hinblick auf schnellere Validierungsverfahren entsteht auch eine stärkere Nachfrage nach Tischgeräten für die Radarsimulation sowie Funktionstests (Bild 1).




Bild 1: ADAS-Stufen und Automatisierungsgrad: mögliche Fahrzeugkonfigurationen
Je nach Entfernung und Frequenzbereich gelten folgende Werte:


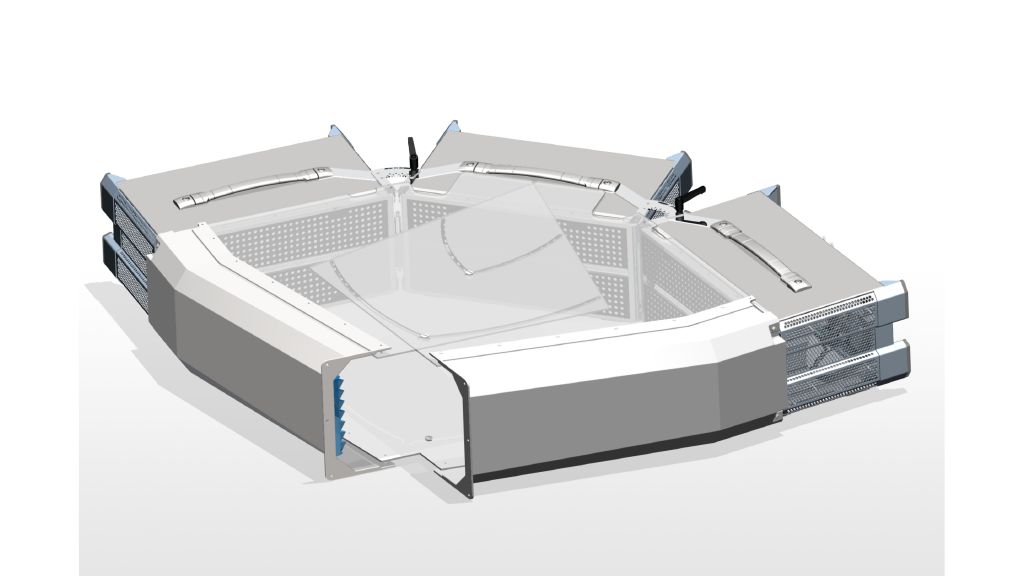
Um den Einfluss externer Störungen zu minimieren, sorgt ein zusätzliches Abschirmsystem für eine nahezu störungsfreie HF-Umgebung, die sich perfekt für das R&S®QAT100 eignet. Das Abschirmsystem kann in Laboratorien auf Tischen oder in Fahrzeugprüfständen eingesetzt werden. Die Abschirmung schafft für das zu testende Radargerät eine Umgebung ohne Mehrwegeausbreitung und Reflexionen. In Kombination mit dem R&S®QAT100 sorgen kleine Flachantennen mit einer von Absorbern ausgekleideten Oberfläche für ein sauberes HF-Frontend und unterdrücken Ziele im Nahbereich sowie mögliche Mehrwegreflexionen (siehe Bild 10).
Bild 10: Abschirmung und Montagesatz
Das Abschirmsystem wird an das R&S®QAT100 angeschlossen und schirmt Radargeräte vor externen Signalen ab. Es ist in verschiedenen Größen erhältlich, je nach Anzahl der anzuschließenden R&S®QAT100 Advanced Antenna Arrays (z. B. R&S®QAT-Z50 Abschirmsystem, R&S®QAT-Z53 Abschirm-Trio).



Heute nutzen OEMs und Engineering-Dienstleister simulierte Umgebungen mit Software-in-the-Loop-Systemen, um Sensoren und Steuermodule zu testen. Softwaresimulationen sind wertvoll, aber sie können die realen, möglicherweise unvollkommenen Reaktionen der Sensoren nicht nachbilden. Vollständig autonome Fahrzeuge müssen mit solchen Unregelmäßigkeiten umgehen können. Straßentests des integrierten Gesamtsystems in einem Prototyp oder einem Fahrzeug mit Straßenzulassung sind notwendig, damit die OEMs vor der Markteinführung das tatsächliche Endprodukt validieren können. Straßentests sind im Entwicklungsprozess wichtig, jedoch kein Allheilmittel – sie sind nämlich auch teuer, zeitaufwendig und schwer zu reproduzieren.
Weitere Tests sind in der gesamten Wertschöpfungskette der Sensorentwicklung erforderlich, und einfache Anwendungsfälle wie Tests einzelner Radarsensorkomponenten müssen genauso integriert werden wie Tests komplexer Szenarien mit mehreren Sensoren. Ziel ist es, autonome Fahrfunktionen wie adaptive Abstands- und Geschwindigkeitsregelung oder Notbremssysteme unter diversen Laborbedingungen zu testen (siehe Bild 2).

Bild 2: Entwicklungsprozess für ADAS-Sensoren
Anzahl und Art der Verbindungen zu einem Radarechogenerator hängen von der Komplexität des Testaufbaus ab. Die Komplexität des Aufbaus wird durch die Anzahl der simulierten Radarobjekte, die Anzahl der R&S®QAT100 Advanced Antenna Arrays oder die Anzahl der Empfangsantennen bestimmt (die Empfangsantennen sind immer im Empfangsbetrieb, können ein Signal aber nur weiterleiten, wenn sie mit einem Backend verbunden sind).
Je nach Anzahl der individuell gesteuerten Antennensegmente benötigt ein Radarechogenerator eine bestimmte Anzahl von Eingängen:


Bild 11 – Variante 1: Verbinden Sie das Sendesignal mit dem Anschluss „TX Σ“. Alle Sendeantennen verwenden jetzt das gleiche Signal.
Bild 11 – Variante 2: Verbinden Sie das Sendesignal mit den Anschlüssen „TX A“ bis „TX D“. Jedes Antennensegment kann nun ein anderes Signal übertragen, sodass bis zu vier Ziele pro TX-Linie möglich sind. Verbinden Sie die Empfangsantennen mit dem „RX IF In“ am Radarechogenerator. Wenn Sie nur ein einziges Empfangssignal vom Radarechogenerator wünschen, verbinden Sie den Anschluss „RX Select“ mit einem „RX IF In“. Um andere externe Geräte wie einen Spektrumanalysator anzuschließen, verwenden Sie den Anschluss „RX Select“.
Um Referenzfrequenzen zu synchronisieren, schließen Sie die Frequenzreferenz (Eingang oder Ausgang) an den Radarechogenerator an.
Wenn das R&S®QAT100 mit der R&S®QAT-B2 Second Line von 96 Sendeantennen ausgestattet ist, verfügt es über zwei Linien mit jeweils vier unabhängigen Segmenten, sodass ein einzelnes Gerät eine Verbindung zu acht individuell steuerbaren ZF-Pfaden herstellen kann. Dies lässt sich perfekt mit den acht völlig unabhängigen künstlichen Objekten kombinieren, die von einem vollausgestatteten R&S®AREG800A Automotive Radar Echo Generator simuliert werden. Jeder ZF-Pfad ist innerhalb eines R&S®QAT100 Segments frei steuerbar.
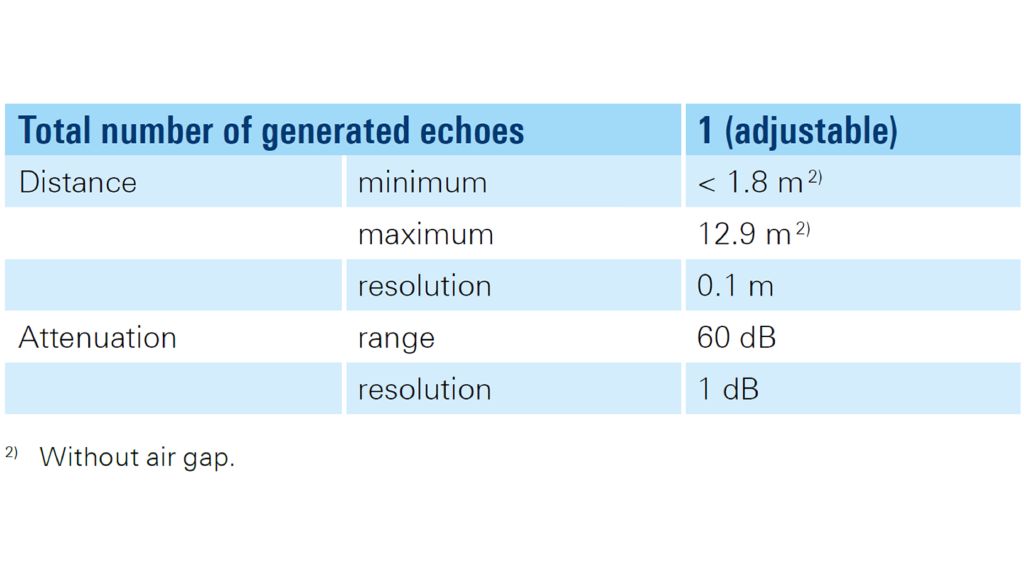
Zur Simulation von Zielen in kürzerer Entfernung kann das R&S®QAT100 mit einer analogen Stufenverzögerungsleitung (Analog Stepped Delay Line, ASDL) ausgestattet werden, um die minimale Verzögerungsleitung zu reduzieren. Mit dieser Leitung können Radarobjekte in sehr geringen Entfernungen von 1,8 m bis 12,9 m simuliert werden, die für Radarechogeneratoren eine Herausforderung darstellen. Sie ermöglicht auch den Standalone-Betrieb des R&S®QAT100. Um die Winkelauflösung Ihres Radarsensors zu testen, unterscheidet der Radarsensor zwischen zwei Zielen in einer bestimmten Entfernung oder einem bestimmten Winkel.
In Kombination mit einem Zielsimulator kann der R&S®AREG800A bewegte Ziele nachbilden.

Realistische und reproduzierbare Radarsensortests stellen für die Sensor-Wertschöpfungskette eine Herausforderung dar:
1) Reduzierung des Sensor-Grundrauschens sowie Unterdrückung von Zielen im Nahbereich und möglichen Mehrwegereflexionen.
Zusammenfassung
Assistenzsysteme für autonomes Fahren sind auf zuverlässige und qualitativ hochwertige Daten von zahlreichen Radarsensoren angewiesen, die Objekte in der Umgebung detektieren. Die Automobilunternehmen und Zulieferer wissen, wie kompliziert Tests dieser Sensoren in autonomen Fahrszenarien sein können.
Das R&S®QAT100 ist das erste vollständig elektronisch steuerbare Antennenarray, das Automotive-Radarsensoren im Bereich von 76 GHz bis 81 GHz stimuliert. Dank dem modularen Konzept des R&S®QAT100 können sich Automobilhersteller und deren Partner auf die Entwicklung und Prüfung von ADAS-Systemen konzentrieren.
Offene Architekturen bei OEMs ermöglichen es Zulieferern und Dienstleistern, die R&S®QAT100 Plattform problemlos in kommerzielle 3D-Modellierung, Hardware-in-the-Loop-Systeme und bestehende Test- und Simulationsumgebungen zu integrieren. Es werden schnellere Tests von Automotive-Radarsensoren entlang der gesamten Wertschöpfungskette ermöglicht – von der einfachen Funktionsvalidierung von Komponenten bis hin zu hochkomplexen Multitarget-Szenariotests.





