Front-end con orientación electrónica para la certificación de radares de automóviles
El primer sistema de antenas del mundo con orientación totalmente electrónica.
El primer sistema de antenas del mundo con orientación totalmente electrónica.
Su misión
La conducción automatizada (AD) y los sistemas avanzados de asistencia a la conducción (ADAS) se han convertido en los principales motores de la innovación en el sector automovilístico. Los sensores radar constituyen una de las tecnologías esenciales para los sistemas AD y ADAS, y deben someterse a test en diferentes situaciones, como p. ej. en presencia de peatones (un objeto cruzando frente a un vehículo), la conducción en ciudad (aproximación hacia un vehículo estacionario o que circula a menor velocidad) y el tráfico interurbano (similar al tráfico urbano sin que la línea central del vehículo examinado esté alineada con el centro del blanco).
Para alcanzar los niveles 4 y 5 de ADAS se necesitan configuraciones de prueba HIL (hardware-in-the-loop) y VIL (vehicle-in-the-loop) con funciones de simulación de blancos más complejas. Asimismo, cada vez es mayor la demanda de equipos de sobremesa que permitan realizar la simulación de radar y ensayos funcionales para acelerar el proceso de validación (fig. 1).

Fig. 1: Niveles de ADAS y grado de automatización: posibles configuraciones del vehículo

Fig. 2: Proceso de desarrollo de sensores para ADAS
En la actualidad, los fabricantes de equipos originales (OEM) y proveedores de servicios de ingeniería utilizan entornos simulados con sistemas «software-in-the-loop» (SIL) para probar los sensores y módulos de control. Las simulaciones de software son sin duda útiles, pero no pueden replicar la respuesta de los sensores en la situación real y sus posibles anomalías. Los vehículos totalmente autónomos deben ser capaces de gestionar estas irregularidades. Los test en carretera de un sistema totalmente integrado en un vehículo prototipo u homologado son un imperativo, ya que permiten a los OEM validar un producto final antes del lanzamiento al mercado. Sin duda, las pruebas en carretera son importantes para el proceso de desarrollo, pero como solución única no son suficientes: su ejecución resulta cara, exige mucho tiempo y son difíciles de replicar.
La cadena de valor añadido a lo largo de todo el proceso de desarrollo de los sensores requiere diferentes pruebas, que deben integrar tanto los casos de uso sencillos, como la verificación de componentes individuales de sensores radar, como ensayos en situaciones complejas con numerosos sensores. El objetivo es verificar funciones de conducción automatizada, como el control de crucero adaptativo o los sistemas de frenado de emergencia, en diferentes condiciones de laboratorio (véase la fig. 2).
Los ensayos de sensores radar en condiciones reales y repetibles plantean varios desafíos en la cadena de valor de los sensores:
1) Reducción del ruido de fondo del sensor y supresión de blancos de rango cercano y posibles reflexiones por trayectos múltiples.
Solución Rohde & Schwarz
Los actuales simuladores de blancos utilizan antenas de bocina como front-end, donde cada punto apunta a los sensores radar y simula posiciones horizontales y verticales mediante el movimiento mecánico de la antena. La automatización mecánica alarga el tiempo del ensayo en general. Cada movimiento de la antena cambia el ángulo de llegada (AoA) del eco, lo que genera errores y pérdida de precisión en la adquisición de blancos si no se recalculan o recalibran las antenas.
Para superar las limitaciones de los sistemas actuales y atendiendo a la creciente importancia de los sistemas HIL y VIL, Rohde & Schwarz ha desarrollado el sistema de antenas avanzado R&S®QAT100 – la primera red de antenas del mundo con orientación electrónica. R&S®QAT100 simula el azimut y la elevación mediante la activación de pequeñas antenas planas. El tiempo de conmutación entre las antenas es de unos 2 ms para simular blancos azimutales con movimiento rápido (p. ej., tráfico que cruza en una intersección o situaciones de paso).
Visión general de los sensores radar


Estimulación de radar OTA en elevación y azimut sin mover físicamente las antenas
RF sin perturbaciones: sin reflexiones del front-end
Las antenas PCB tienen una sección equivalente de radar mucho menor que las antenas de bocina de ganancia estándar que utilizan otros sistemas. El sistema de apantallamiento R&S®QAT-B50 garantiza un entorno de RF blindado.
Solución escalable
Se pueden combinar varios front-ends para simular hasta 360° de entorno del radar.
Insensible a la vibración: perfectamente adaptado para el montaje en bancos de prueba VIL
1) campo de visión.
Casos de uso
La configuración modular del sistema R&S®QAT100 se puede utilizar para diferentes aplicaciones de simulación de blancos de radar.
Ensayos de componentes o funcionales
Puede partirse de casos de uso muy sencillos, como pruebas de componentes para un sensor radar independiente. Para verificar si un sensor radar detecta correctamente un eco, distingue entre dos blancos a una distancia determinada o en un ángulo determinado y la resolución angular de su sensor radar.
Test de escenarios
Entre los casos de uso secundarios se incluyen escenarios como situaciones de tráfico con muchos vehículos, sistemas de frenado de emergencia o el control de crucero adaptativo. Con ello se simulan blancos en movimiento con azimut, rango, velocidad radial y tamaño de blanco. Dependiendo del escenario se pueden simular uno o más sensores.


El sistema R&S®QAT100 ofrece la versatilidad y el rendimiento necesarios para apoyar todo el proceso de desarrollo de los sensores radar.
Abarca desde la aplicación como equipo autónomo para la evaluación del rendimiento de sensores radar en las fases iniciales, con configuraciones de medida clásicas de sobremesa, hasta aplicaciones HIL y VIL (con simulador de blancos como backend) a nivel de módulos de sensores radar para la adaptación de los sensores las especificaciones del OEM (fig. 6).

El front-end estándar R&S®QAT-B11 tiene 96 antenas transmisoras y 5 antenas receptoras, divididas en 4 segmentos independientes. La configuración cumple los requisitos para sensores SIMO. El sistema R&S®QAT100 puede funcionar en modo lineal o en modo segmentado, dependiendo de las necesidades. El modo segmentado divide cada línea en cuatro segmentos, cada uno de los cuales tiene un conector de RF individual y puede simular hasta cuatro blancos de distintas direcciones. El R&S®QAT-B11 puede ir equipado con una línea TX/RX adicional (R&S®QAT-B2) para agregar otras 96 antenas transmisoras y 5 receptoras, lo que permite simular hasta 8 blancos de distintas direcciones o dos objetos para la red completa de antenas.
Debido al mayor desfase entre las antenas receptoras y transmisoras, el front-end R&S®QAT-B11 no satisface completamente los requerimientos para MIMO, ya que puede activarse en diferentes ángulos. El front-end MIMO de línea única R&S®QAT-B21 dispone de una línea de antenas receptoras y una línea de antenas transmisoras. Cada antena transmisora está emparejada con una antena receptora, para cumplir así los requerimientos MIMO. Así, ahora se dispone de 96 antenas receptoras y 96 antenas transmisoras para minimizar errores de fase y facilitar la validación de radares MIMO con resolución de eco espacial mejorada en tres dimensiones.
Las antenas individuales están a una distancia de 3,7 mm (0,146 pulgadas) entre sí, y el ancho total de la unidad es de 351 mm (13,818 pulgadas). La configuración se puede adaptar al sensor. El sistema R&S®QAT100 está diseñado para la potencia de transmisión típica de radares de ADAS.
El campo de visión (FOV) y la resolución angular que puede alcanzarse con el sistema R&S®QAT100 se basan en la configuración y se calculan del siguiente modo:


La conducción automatizada (AD) y los sistemas avanzados de asistencia a la conducción (ADAS) se han convertido en los principales motores de la innovación en el sector automovilístico. Los sensores radar constituyen una de las tecnologías esenciales para los sistemas AD y ADAS, y deben someterse a test en diferentes situaciones, como p. ej. en presencia de peatones (un objeto cruzando frente a un vehículo), la conducción en ciudad (aproximación hacia un vehículo estacionario o que circula a menor velocidad) y el tráfico interurbano (similar al tráfico urbano sin que la línea central del vehículo examinado esté alineada con el centro del blanco).
Para alcanzar los niveles 4 y 5 de ADAS se necesitan configuraciones de prueba HIL (hardware-in-the-loop) y VIL (vehicle-in-the-loop) con funciones de simulación de blancos más complejas. Asimismo, cada vez es mayor la demanda de equipos de sobremesa que permitan realizar la simulación de radar y ensayos funcionales para acelerar el proceso de validación (fig. 1).




Fig. 1: Niveles de ADAS y grado de automatización: posibles configuraciones del vehículo
Dependiendo de la distancia y el rango de frecuencias, se aplican los siguientes valores:


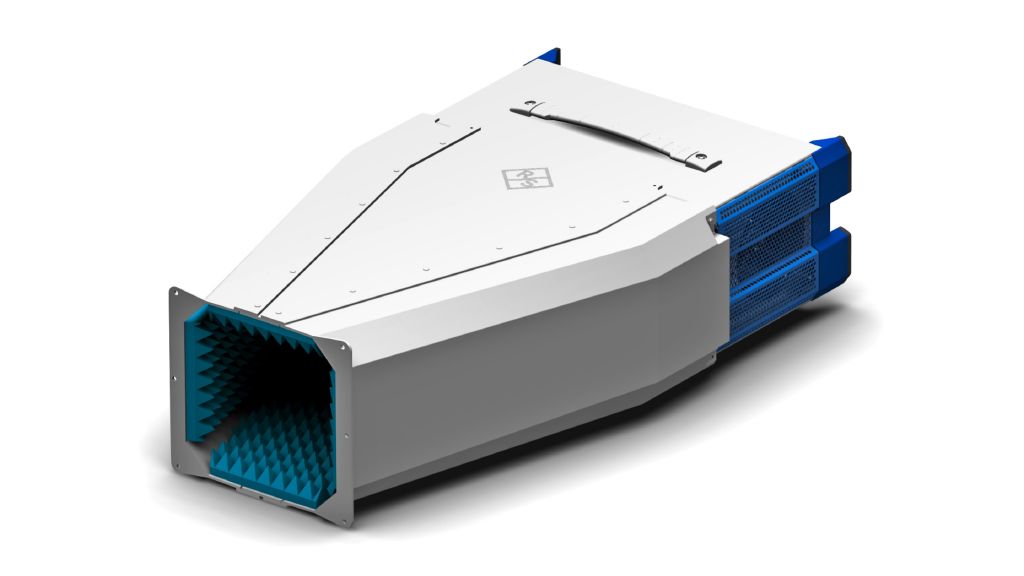
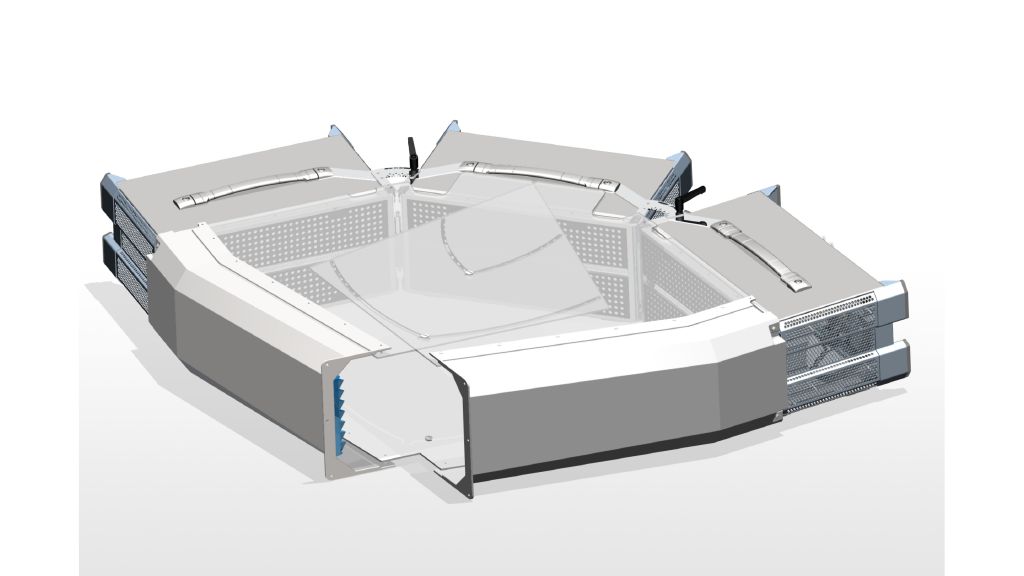
Para reducir al mínimo la influencia de las interferencias externas, un sistema de apantallamiento adicional proporciona un entorno de RF prácticamente exento de interferencias y perfectamente adaptado para el sistema R&S®QAT100. El sistema de apantallamiento se puede utilizar en laboratorios para configuraciones de sobremesa o en bancos de prueba de automóviles. El apantallamiento proporciona un entorno sin reflexiones ni propagación de múltiples trayectos para el radar examinado. En combinación con el R&S®QAT100, pequeñas antenas planas con una superficie cubierta de material absorbente garantizan la ausencia de perturbaciones en el front-end de RF y suprimen blancos de rango cercano así como posibles reflexiones multitrayecto (véase la fig. 10).
Fig. 10: Set de montaje y apantallamiento
El sistema de apantallamiento realiza la conexión al R&S®QAT100 y protege los radares de las señales externas. Está disponible en diferentes tamaños, dependiendo del número de sistemas de antenas R&S®QAT100 que se haya conectado (p. ej., sistema de apantallamiento R&S®QAT-Z50, trío de apantallamiento R&S®QAT-Z53).



En la actualidad, los fabricantes de equipos originales (OEM) y proveedores de servicios de ingeniería utilizan entornos simulados con sistemas «software-in-the-loop» (SIL) para probar los sensores y módulos de control. Las simulaciones de software son sin duda útiles, pero no pueden replicar la respuesta de los sensores en la situación real y sus posibles anomalías. Los vehículos totalmente autónomos deben ser capaces de gestionar estas irregularidades. Los test en carretera de un sistema totalmente integrado en un vehículo prototipo u homologado son un imperativo, ya que permiten a los OEM validar un producto final antes del lanzamiento al mercado. Sin duda, las pruebas en carretera son importantes para el proceso de desarrollo, pero como solución única no son suficientes: su ejecución resulta cara, exige mucho tiempo y son difíciles de replicar.
La cadena de valor añadido a lo largo de todo el proceso de desarrollo de los sensores requiere diferentes pruebas, que deben integrar tanto los casos de uso sencillos, como la verificación de componentes individuales de sensores radar, como ensayos en situaciones complejas con numerosos sensores. El objetivo es verificar funciones de conducción automatizada, como el control de crucero adaptativo o los sistemas de frenado de emergencia, en diferentes condiciones de laboratorio (véase la fig. 2).

Fig. 2: Proceso de desarrollo de sensores para ADAS
El número y el tipo de conexiones a un generador de eco radar depende de la complejidad de la configuración de medida. La complejidad de la configuración depende del número de objetos de radar simulados, el número de sistemas de antenas R&S®QAT100 o el número de antenas receptoras (las antenas receptoras siempre reciben, pero solo pueden transmitir una señal si se conectan a un backend).
Dependiendo del número de segmentos de antenas controlados individualmente, el generador de eco radar debe tener un determinado número de entradas:

 se conectan a «RX IF In» en el generador de eco radar. Si desea tan solo una única señal de recepción del generador de eco radar, conecte «RX Select» a un «RX IF In». Para conectar otros dispositivos externos, como un analizador de espectro, utilice el conector «RX Select».")
Fig. 11 - Variante 1 Conexión de la señal en transmisión al conector «TX Σ». Ahora, todas las antenas transmisoras comparten la misma señal.
Fig. 11 - Variante 2: Conexión de la señal en transmisión del conector «TX A» al conector «TX D». Cada segmento de antena puede transmitir ahora una señal diferente, lo que permite hasta cuatro blancos por línea TX. Las antenas receptoras (RX) se conectan a «RX IF In» en el generador de eco radar. Si desea tan solo una única señal de recepción del generador de eco radar, conecte «RX Select» a un «RX IF In». Para conectar otros dispositivos externos, como un analizador de espectro, utilice el conector «RX Select».
Para sincronizar frecuencias de referencia, conecte la referencia de frecuencia (entrada o salida) al generador de eco radar.
Si se equipa con la segunda línea R&S®QAT-B2 de 96 antenas transmisoras, el R&S®QAT100 ofrece dos líneas con cuatro segmentos independientes cada una, lo que permite conectar un único instrumento a ocho caminos de FI controlables por separado. Esto se adapta perfectamente a los ocho objetos artificiales completamente independientes simulados por un generador de eco radar para automoción R&S®AREG800A totalmente equipado. Cada camino de FI se puede direccionar libremente dentro de un segmento del R&S®QAT100.
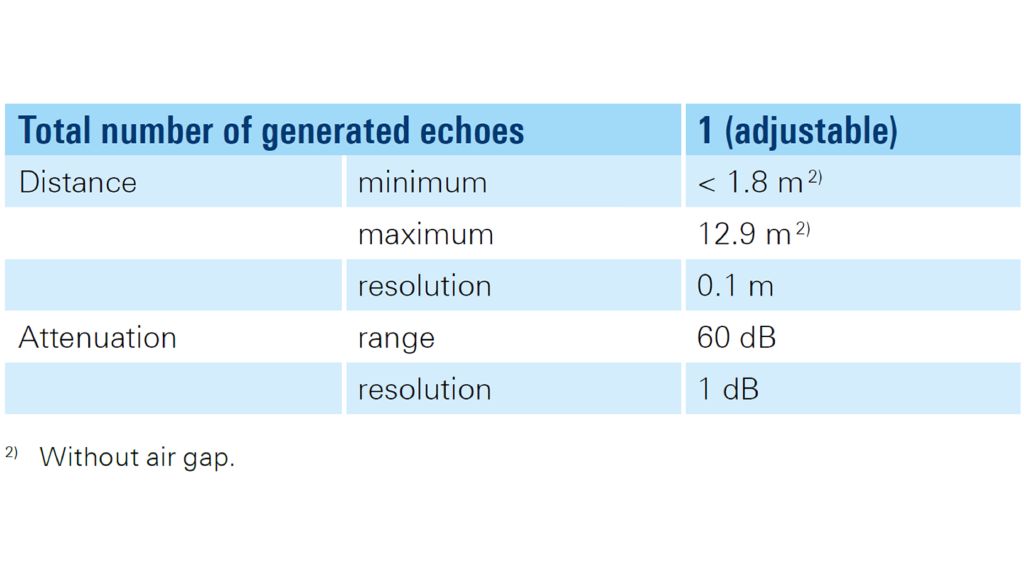
Para simular blancos en un rango más cercano, el R&S®QAT100 se puede equipar con una línea de retardo escalonada analógica (ASDL) que reduce la línea de retardo mínima. Esta línea puede simular objetos de radar a muy cortas distancias desde 1,8 m hasta 12,9 m, que plantean dificultades en los generadores de eco radar. Además, permiten el uso del R&S®QAT100 en modo autónomo. Para verificar la resolución angular de su sensor radar, el sensor radar distingue entre dos blancos a una distancia determinada o en un ángulo determinado.
En combinación con un simulador de blancos, el R&S®AREG800A puede simular objetos en movimiento.

Los ensayos de sensores radar en condiciones reales y repetibles plantean varios desafíos en la cadena de valor de los sensores:
1) Reducción del ruido de fondo del sensor y supresión de blancos de rango cercano y posibles reflexiones por trayectos múltiples.
Resumen
En los sistemas de asistencia a la conducción autónoma es absolutamente necesario contar con datos fiables y de alta calidad de diferentes sensores radar para detectar los objetos que se encuentran alrededor. Los fabricantes y los proveedores de automóviles son perfectamente conscientes de lo complicado que puede ser probar estos sensores en escenarios de conducción automatizada.
El R&S®QAT100 es el primer sistema de antenas con orientación totalmente electrónica que estimula sensores radar de automóviles en el rango de 76 GHz a 81 GHz. El concepto modular del R&S®QAT100 permite a los OEM y proveedores del sector automovilístico concentrarse de lleno en el desarrollo y la verificación de los sistemas ADAS.
La arquitectura abierta de los OEM permite a los proveedores de componentes y de servicios integrar fácilmente la plataforma R&S®QAT100 en sistemas de modelado 3D comerciales, sistemas hardware-in-the-loop (HIL) y entornos de test y simulación ya existentes. De este modo es posible realizar pruebas de sensores radar de automóviles más rápidas en toda la cadena de valor añadido, desde la simple validación funcional de componentes hasta test en escenarios con múltiples blancos y altamente complejos.





