Frontend elettronicamente orientabile per la qualificazione dei radar automobilistici
La prima schiera di antenne completamente orientabile elettronicamente al mondo.
La prima schiera di antenne completamente orientabile elettronicamente al mondo.
Attività da eseguire
La guida autonoma (AD) e i sistemi avanzati di assistenza alla guida (ADAS) sono uno dei principali motori di innovazione dell'industria automobilistica. I sensori radar sono una delle tecnologie chiave per la guida autonoma e i sistemi ADAS e devono essere verificati in base a diversi scenari operativi, come i pedoni (un oggetto che attraversa davanti all'auto), la guida in città (guida verso un veicolo fermo o più lento) e i viaggi interurbani (simili a quelli in città, dove la linea centrale del veicolo in prova non è in linea con il centro dell'obiettivo).
Per raggiungere i livelli ADAS 4 e 5 sono necessari scenari di test hardware-in-the-loop (HIL) e vehicle-in-the-loop (VIL) con capacità di simulazione di bersagli più complessi. Cresce anche la domanda di simulazioni radar e test funzionali al banco per accelerare il processo di validazione (Fig. 1).

Fig. 1: Livelli ADAS e grado di automazione: potenziali configurazioni del veicolo

Fig. 2: Processo di sviluppo dei sensori ADAS
Oggi gli OEM e i fornitori di servizi di ingegneria utilizzano ambienti simulati con sistemi software-in-the-loop per verificare il comportamento dei sensori e dei moduli di controllo. Le simulazioni software sono preziose, ma non possono replicare le risposte reali e potenzialmente imperfette dei sensori. I veicoli completamente autonomi devono gestire queste irregolarità. Le prove su strada di un intero sistema integrato in un prototipo o in un veicolo omologato sono necessarie perché consentono agli OEM di validare il prodotto finale prima del suo lancio sul mercato. I test su strada sono importanti per il processo di sviluppo, ma da soli non bastano: sono costosi, richiedono tempo e sono difficili da replicare.
Sono necessari ulteriori test lungo l'intera catena del valore dello sviluppo dei sensori e devono essere integrati casi d'uso semplici, come il test di singoli componenti del sensore radar, così come il test di scenari complessi con più sensori. L'obiettivo è quello di verificare le funzioni di guida autonoma, come il controllo di crociera adattivo o i sistemi di frenata d'emergenza, in varie condizioni di laboratorio (vedere Fig. 2).
I test realistici e ripetibili sui sensori radar rappresentano una sfida nella catena del valore dei sensori:
1) Riduzione del rumore di fondo del sensore e soppressione dei bersagli a distanza ravvicinata e delle potenziali riflessioni multicammino.
Soluzione Rohde & Schwarz
Gli attuali simulatori di bersagli utilizzano antenne a tromba come frontend, in cui ogni punto mira ai sensori radar ed emula le posizioni orizzontali e verticali muovendo meccanicamente l'antenna. L'automazione meccanica rallenta i tempi complessivi dei test. Ogni movimento dell'antenna modifica l'angolo di arrivo (AoA) dell'eco, causando errori e perdita di accuratezza nel rendering dei bersagli quando le antenne non vengono ricalcolate o ricalibrate.
Per superare le attuali limitazioni dei sistemi e affrontare la crescente importanza delle metodologie di test HIL e VIL, Rohde & Schwarz ha sviluppato la schiera di antenne avanzate R&S®QAT100, il primo array di antenne orientabile elettronicamente al mondo. La schiera di antenne R&S®QAT100 simula l'azimut e l'elevazione attivando piccole antenne patch. Il tempo di commutazione tra le antenne è di circa 2 ms per simulare bersagli azimutali in rapido movimento (ad esempio, traffico trasversale a un incrocio o scenari di passaggio).
Panoramica dei sensori radar


Stimolazione radar in modalità OTA (over the air) in elevazione e azimut senza spostare fisicamente le antenne
Segnale RF pulito: nessun riflesso dal front end
Le antenne su circuito stampato (PCB) hanno una sezione radar (RCS) molto più bassa rispetto alle trombe a guadagno standard utilizzate in altri sistemi. Il sistema di schermatura R&S®QAT-B50 assicura un ambiente RF schermato.
Soluzione scalabile
È possibile combinare diversi frontend per simulare fino a 360° di ambiente radar:
Immune alle vibrazioni: perfettamente adatto al montaggio sul banco di prova VIL
1) Campo visivo.

Casi d’uso
La configurazione modulare della schiera di antenne R&S®QAT100 può essere utilizzata in diverse applicazioni per la simulazione di bersagli radar.
Test funzionali o di componenti
Si parte da casi d'uso molto semplici, come il test dei componenti di un singolo sensore radar. Per verificare se un sensore radar rileva correttamente un'eco, distingue tra due bersagli a una determinata distanza o a un determinato angolo e la risoluzione angolare del sensore radar.
Test di scenari
I casi d'uso secondari includono test di scenari, come scenari di traffico con più auto, sistemi di frenata d'emergenza o controllo di crociera adattivo. L'obiettivo è simulare bersagli in movimento in azimut, distanza, velocità radiale e dimensioni del bersaglio. A seconda dello scenario, è possibile simulare uno o più sensori.


La schiera di antenne R&S®QAT100 ha la versatilità e la capacità di supportare l'intero processo lungo la catena dei sensori radar.
A partire dall'utilizzo della schiera di antenne R&S®QAT100 come dispositivo autonomo per la valutazione delle prestazioni dei sensori radar nelle fasi iniziali con le classiche configurazioni da banco, fino alle applicazioni di test HIL e VIL (con il simulatore di target come backend) a livello di modulo del sensore radar quando si adatta un sensore alle specifiche OEM (Fig. 6).

Il frontend standard R&S®QAT-B11 dispone di 96 antenne di trasmissione e 5 di ricezione, suddivise in 4 segmenti indipendenti. La configurazione soddisfa i requisiti dei sensori SIMO. La schiera di antenne R&S®QAT100 può essere utilizzata in modalità linea o in modalità segmento, a seconda delle esigenze. La modalità Segmento divide ogni linea in quattro segmenti, ognuno dei quali ha un connettore RF individuale e può simulare fino a quattro bersagli da direzioni diverse. Il frontend R&S®QAT-B11 può essere dotato di una linea TX/RX aggiuntiva (R&S®QAT-B2) per aggiungere altre 96 antenne di trasmissione e 5 di ricezione per simulare fino a 8 bersagli da direzioni diverse o due oggetti sull'intero array.
L'offset maggiore tra le antenne RX e TX fa sì che il frontend R&S®QAT-B11 non soddisfi pienamente i requisiti MIMO, poiché il segnale potrebbe giungere con angolazioni diverse. Il frontend MIMO a linea singola R&S®QAT-B21 dispone di una linea di antenne di ricezione e di una linea di antenne di trasmissione. Ogni antenna di trasmissione è abbinata a un'antenna di ricezione per soddisfare i requisiti MIMO. Sono ora disponibili 96 antenne di ricezione e 96 antenne di trasmissione per ridurre al minimo gli errori di fase e consentire una facile validazione dei radar MIMO con una migliore risoluzione spaziale dell'eco in tre dimensioni.
Le singole antenne distano tra loro 3,7 mm (0,146"), mentre la larghezza totale dell'unità è di 351 mm (13,818"). L'impostazione può essere adattata al sensore. La schiera di antenne R&S®QAT100 è progettata per la tipica potenza di trasmissione dei radar ADAS.
Il campo visivo (FOV) e la risoluzione angolare ottenibile per l'array R&S®QAT100 si basano sulla configurazione e sono calcolati come segue:


La guida autonoma (AD) e i sistemi avanzati di assistenza alla guida (ADAS) sono uno dei principali motori di innovazione dell'industria automobilistica. I sensori radar sono una delle tecnologie chiave per la guida autonoma e i sistemi ADAS e devono essere verificati in base a diversi scenari operativi, come i pedoni (un oggetto che attraversa davanti all'auto), la guida in città (guida verso un veicolo fermo o più lento) e i viaggi interurbani (simili a quelli in città, dove la linea centrale del veicolo in prova non è in linea con il centro dell'obiettivo).
Per raggiungere i livelli ADAS 4 e 5 sono necessari scenari di test hardware-in-the-loop (HIL) e vehicle-in-the-loop (VIL) con capacità di simulazione di bersagli più complessi. Cresce anche la domanda di simulazioni radar e test funzionali al banco per accelerare il processo di validazione (Fig. 1).




Fig. 1: Livelli ADAS e grado di automazione: potenziali configurazioni del veicolo
A seconda della distanza e della gamma di frequenze, si applicano i seguenti valori:


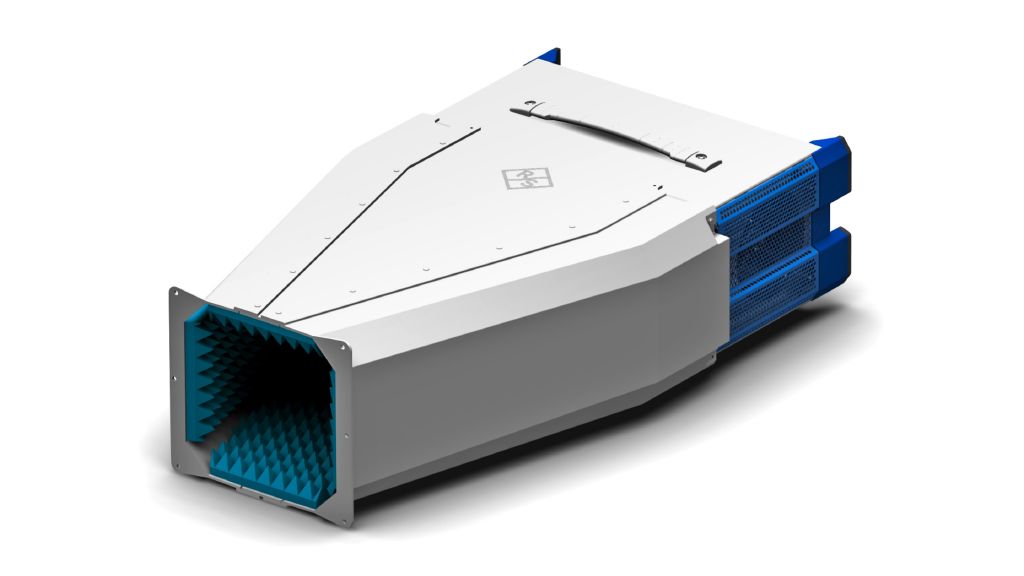
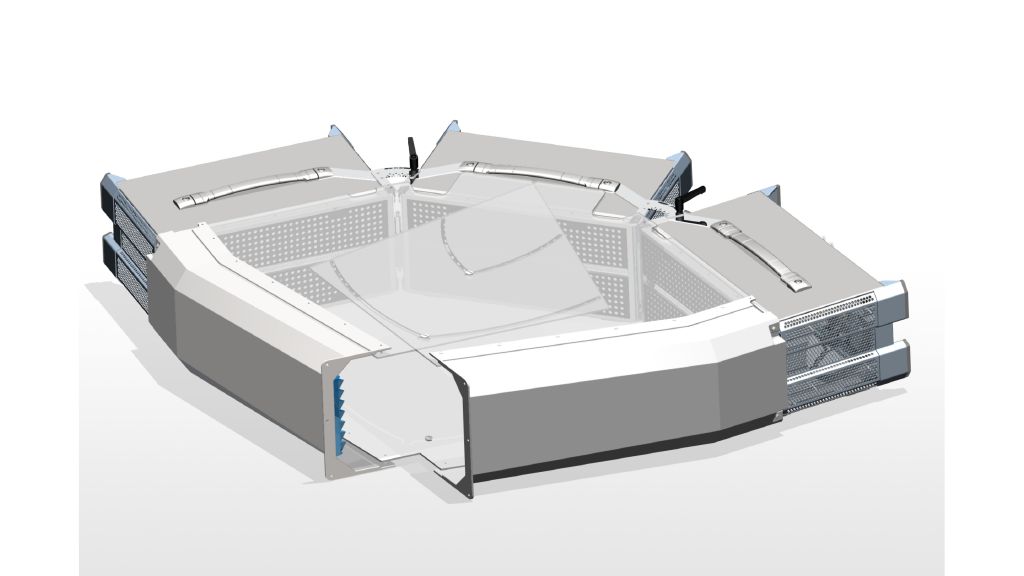
Per ridurre al minimo l'influenza delle interferenze esterne, un sistema di schermatura aggiuntivo offre un ambiente RF quasi privo di interferenze, perfettamente adatto alla schiera di antenne R&S®QAT100. Il sistema di schermatura può essere utilizzato in laboratorio su piani di lavoro o su banchi di prova per veicoli. La schermatura fornisce un ambiente multicammino e privo di riflessioni per il radar in fase di test. In combinazione con l'array R&S®QAT100, le piccole antenne patch con superficie ricoperta da un assorbitore forniscono un frontend RF pulito e sopprimono i bersagli a distanza ravvicinata e le potenziali riflessioni multicammino (vedere Fig. 10).
Fig. 10: Set di schermatura e montaggio
Il sistema di schermatura si collega alla schiera di antenne R&S®QAT100 e scherma i radar dai segnali esterni. È disponibile in diverse dimensioni a seconda del numero di array di antenne avanzate R&S®QAT100 collegati (ad esempio, sistema di schermatura R&S®QAT-Z50, trio di schermatura R&S®QAT-Z53).



Oggi gli OEM e i fornitori di servizi di ingegneria utilizzano ambienti simulati con sistemi software-in-the-loop per verificare il comportamento dei sensori e dei moduli di controllo. Le simulazioni software sono preziose, ma non possono replicare le risposte reali e potenzialmente imperfette dei sensori. I veicoli completamente autonomi devono gestire queste irregolarità. Le prove su strada di un intero sistema integrato in un prototipo o in un veicolo omologato sono necessarie perché consentono agli OEM di validare il prodotto finale prima del suo lancio sul mercato. I test su strada sono importanti per il processo di sviluppo, ma da soli non bastano: sono costosi, richiedono tempo e sono difficili da replicare.
Sono necessari ulteriori test lungo l'intera catena del valore dello sviluppo dei sensori e devono essere integrati casi d'uso semplici, come il test di singoli componenti del sensore radar, così come il test di scenari complessi con più sensori. L'obiettivo è quello di verificare le funzioni di guida autonoma, come il controllo di crociera adattivo o i sistemi di frenata d'emergenza, in varie condizioni di laboratorio (vedere Fig. 2).

Fig. 2: Processo di sviluppo dei sensori ADAS
Il numero e i tipi di connessioni al generatore di echi radar dipendono dalla complessità del sistema di prova. La complessità della configurazione dipende dal numero di oggetti radar simulati, dal numero di schiere di antenne avanzate R&S®QAT100 o dal numero di antenne di ricezione (le antenne di ricezione ricevono sempre, ma possono inoltrare un segnale solo se collegate a un backend).
A seconda del numero di segmenti d'antenna controllati individualmente, un generatore di echi radar deve disporre di un certo numero di ingressi:


Fig. 11 - Variante 1 Collegare il segnale di trasmissione al connettore "TX Σ". Tutte le antenne di trasmissione condividono ora lo stesso segnale.
Fig. 11 - Variante 2: Collegare il segnale di trasmissione dal connettore "TX A" al connettore "TX D". Ogni segmento d'antenna può trasmettere un segnale diverso, consentendo fino a quattro bersagli per linea TX. Collegare le antenne RX all'"RX IF In" del generatore di echi radar. Se si desidera un solo segnale di ricezione dal generatore di echi radar, collegare "RX Select" a un "RX IF In". Per collegare altri dispositivi esterni, come ad esempio un analizzatore di spettro, utilizzare il connettore "RX Select".
Per sincronizzare le frequenze di riferimento, collegare il riferimento di frequenza (ingresso o uscita) al generatore di echi radar.
Se equipaggiato con la seconda linea di 96 antenne di trasmissione R&S®QAT-B2, la schiera di antenne R&S®QAT100 dispone di due linee con quattro segmenti indipendenti ciascuna, consentendo a un singolo strumento di collegarsi a otto cammini IF controllabili individualmente. Questo si combina perfettamente con gli otto oggetti artificiali completamente indipendenti simulati da un generatore di echi radar per autoveicoli R&S®AREG800A completamente equipaggiato. Ogni cammino IF può essere orientato liberamente all'interno di un segmento della schiera di antenne R&S®QAT100.
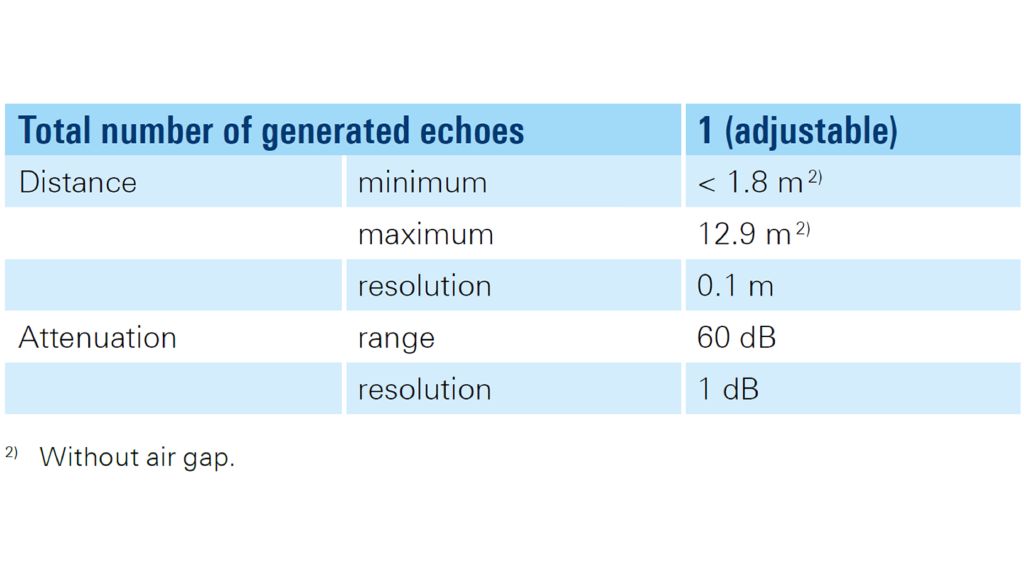
Per simulare bersagli a distanza ridotta, la schiera di antenne R&S®QAT100 può essere dotata di una linea di ritardo analogica a passi (ASDL) per ridurre la linea di ritardo minima. Questa linea è in grado di simulare oggetti radar a distanze molto brevi, da 1,8 a 12,9 m, che rappresentano una sfida per i generatori di echi radar. Consente inoltre l'utilizzo autonomo della schiera di antenne R&S®QAT100. Per verificare la risoluzione angolare del sensore radar, il sensore radar distingue tra due bersagli a una determinata distanza o a un determinato angolo.
In combinazione con un simulatore di bersaglio, R&S®AREG800A può emulare bersagli in movimento.

I test realistici e ripetibili sui sensori radar rappresentano una sfida nella catena del valore dei sensori:
1) Riduzione del rumore di fondo del sensore e soppressione dei bersagli a distanza ravvicinata e delle potenziali riflessioni multicammino.
Riassunto
I sistemi autonomi di assistenza alla guida hanno urgentemente bisogno di dati affidabili e di alta qualità provenienti da vari sensori radar che rilevano gli oggetti nell'ambiente. Le aziende automobilistiche e i fornitori sanno quanto possa essere complicato verificare questi sensori in scenari di guida autonoma.
La schiera di antenne R&S®QAT100 è il primo array di antenne completamente orientabile elettronicamente che stimola i sensori radar automobilistici nella gamma da 76 GHz a 81 GHz. Il concetto modulare della schiera di antenne R&S®QAT100 consente agli OEM e ai partner del settore automobilistico di concentrarsi sullo sviluppo e sul collaudo dei sistemi ADAS.
L'architettura aperta agli OEM consente ai fornitori e ai service provider di integrare facilmente la piattaforma R&S®QAT100 nei sistemi commerciali di modellazione 3D, hardware-in-the-loop e negli ambienti di test e simulazione esistenti. È possibile verificare più rapidamente i sensori radar per autoveicoli lungo l'intera catena del valore, dalla semplice validazione funzionale dei componenti ai test altamente complessi su più obiettivi.




