Front-end direccionable de manera electrónica para calificar radares de automóviles
Primer sistema de antenas del mundo completamente direccionable de manera electrónica.
Primer sistema de antenas del mundo completamente direccionable de manera electrónica.
Su misión
Tanto la conducción autónoma (AD) como el sistema avanzado de asistencia al conductor (ADAS) son los principales motores de innovación en la industria automotriz. Los sensores radar son una de las tecnologías clave tanto para la AD como para el sistema ADAS y deben probarse para diferentes escenarios, como peatones (un objeto que cruza por delante del automóvil), conducción en la ciudad (conducción hacia un vehículo estacionado o que avanza a menor velocidad), además de viajes entre ciudades o pueblos (parecido a la conducción en la ciudad donde la línea central del vehículo de prueba no se encuentra alineada con el centro del blanco).
Para alcanzar los niveles 4 y 5 del sistema ADAS se necesitan escenarios de prueba de «hardware-in-the-loop» (HIL) y de «vehicle-in-the-loop» (VIL) con funciones más complejas de simulación de blancos. También está aumentando la demanda de simulaciones de radares de banco, así como de ensayos funcionales para acelerar el proceso de validación (fig. 1).


Fig. 1: Niveles de sistemas ADAS y grados de automatización: posibles configuraciones de vehículos


Fig. 2: Proceso de desarrollo de sensores para sistemas ADAS
Hoy en día, los fabricantes de equipos originales y los proveedores de servicios de ingeniería utilizan entornos simulados con sistemas «software-in-the-loop» para probar tanto sensores como módulos de control. Las simulaciones de software son valiosas, pero no pueden reproducir las respuestas tanto en condiciones reales como potencialmente imperfectas de los sensores. Los vehículos completamente autónomos deben lidiar con estas irregularidades. Es necesario probar en carretera todo un sistema integrado en un prototipo o en un vehículo autorizado para circular, debido a que esto permite a los fabricantes de equipos originales validar un producto final antes de introducirlo al mercado. Las pruebas en carreteras son importantes para el proceso de desarrollo, pero por sí solas no son suficientes: tienen un costo elevado, requieren de mucho tiempo, además son difíciles de reproducir.
Es necesario realizar pruebas adicionales a lo largo de toda la cadena de valor añadido de desarrollo de sensores, además de integrar casos de usos sencillos como pruebas tanto de componentes individuales de sensores de radar como de escenarios complejos con múltiples sensores. El objetivo es probar funciones de conducción autónoma como el control de crucero adaptativo (ACC) o los sistemas de frenado de emergencia bajo diversas condiciones de laboratorio (véase fig. 2).
Tanto las pruebas realistas como repetibles de los sensores radar suponen un desafío en la cadena de valor añadido de estos:
1) Reducción del ruido de fondo del sensor, así como supresión de blancos cercanos y de posibles reflexiones multitrayecto.
Solución de Rohde & Schwarz
Los simuladores de blancos actuales utilizan antenas de bocina, como front-ends, donde al mover de manera mecánica la antena cada punta apunta a los sensores radar y emula posiciones horizontales y verticales. La automatización mecánica retarda el tiempo de las pruebas. Cada movimiento de la antena modifica el ángulo de llegada (AoA) del eco, lo que conlleva, cuando las antenas no se recalculan o se recalibran, a errores y pérdidas de precisión al momento de representar los blancos.
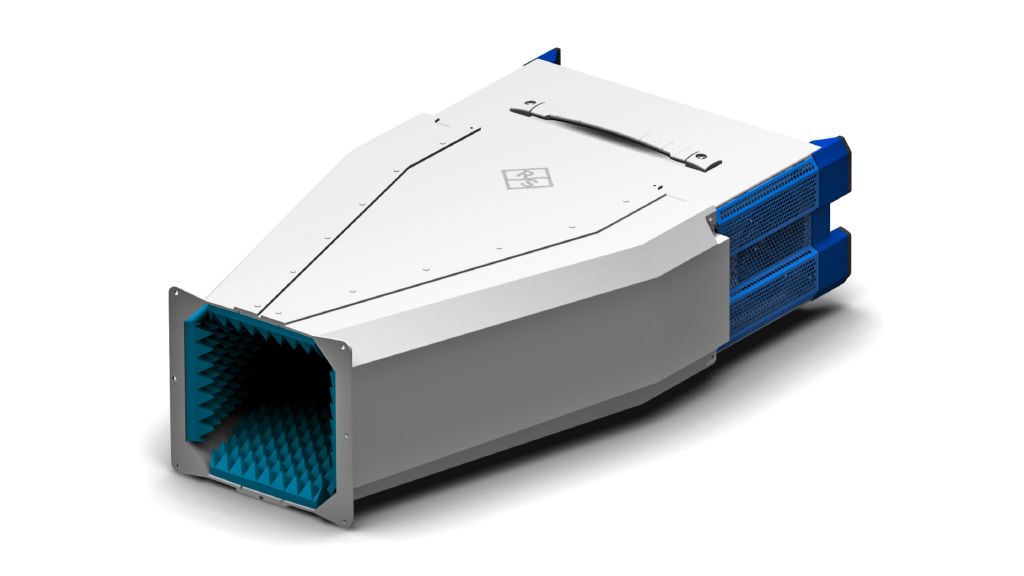
Para superar las limitaciones de los sistemas actuales y hacer frente a la creciente importancia tanto de HIL como de VIL, Rohde & Schwarz ha desarrollado el sistema de antenas de vanguardia R&S®QAT100, el primer sistema de antenas direccionable de manera electrónica del mundo. Al activar pequeñas antenas planas el R&S®QAT100 simula el azimut y la elevación. Para simular blancos azimutales en rápido movimiento (por ejemplo, tráfico cruzado en una intersección o escenarios de adelanto vehicular), el tiempo de conmutación entre las antenas es de aproximadamente 2 ms.
Generalidades de los sensores radar


Estimulación over-the-air del radar en elevación y azimut sin la necesidad de mover físicamente las antenas
RF limpia: sin reflejos de FE
Las antenas de placa de circuito impreso tienen una sección equivalente de radar mucho menor que las bocinas de ganancia estándar que se utilizan en otros sistemas. El sistema de apantallamiento del R&S®QAT-B50 asegura un entorno de RF blindado.
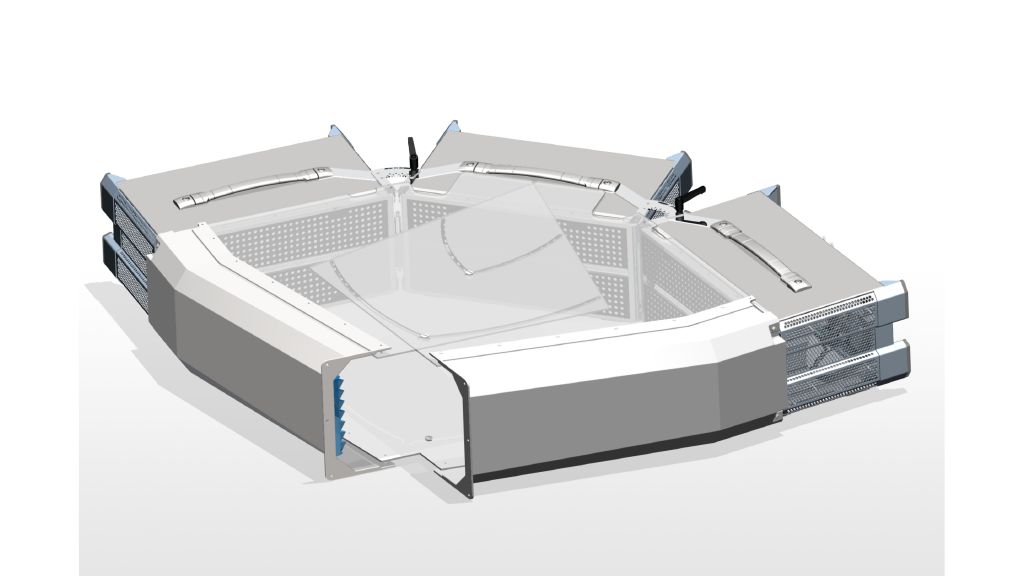
Solución escalable
Pueden combinarse varios front-ends para simular hasta 360° de entorno de radar:
Inmune a vibraciones: perfectamente adaptado para su montaje en bancos de pruebas VIL
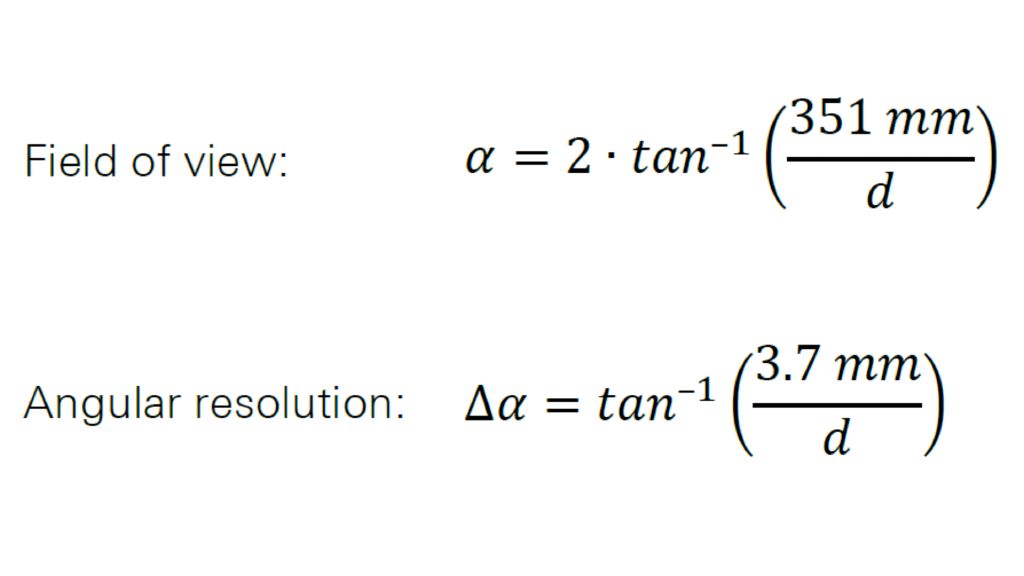
1) Visión de campo.
Casos de uso
La configuración modular del R&S®QAT100 puede utilizarse en diferentes aplicaciones para la simulación de blancos de radar.
Pruebas de componentes o ensayos funcionales
Se inicia con casos de uso muy sencillos como pruebas de componentes para un único sensor radar. Para comprobar si un sensor radar detecta un eco de manera correcta, este debe distinguir entre dos blancos a una distancia o ángulo determinados, además de la resolución angular de su sensor radar.
Pruebas de escenario
Los casos de uso secundarios incluyen pruebas de escenarios como escenarios de tráfico con múltiples automóviles, sistemas de frenado de emergencia o control de crucero adaptativo (ACC). El objetivo es simular blancos en movimiento en azimut, rango, velocidad radial y tamaño del blanco. En función del escenario pueden simularse uno o varios sensores.


El R&S®QAT100 tiene la versatilidad y capacidad de admitir todo el proceso a lo largo de la cadena de valor añadido del sensor radar.
Se inicia con el R&S®QAT100 como un dispositivo independiente para evaluar el rendimiento del sensor radar en las etapas iniciales con configuraciones de banco clásicas, hasta aplicaciones HIL y VIL (con un simulador de blancos como «backend») a nivel del módulo del sensor radar cuando se adapta un sensor a las especificaciones del fabricante de equipos originales (fig. 6).


El front-end estándar R&S®QAT-B11 tiene 96 antenas de transmisión y 5 de recepción, que se dividen en 4 segmentos independientes. La configuración cumple con los requisitos de los sensores SIMO. El R&S®QAT100 puede funcionar tanto en modo línea como en modo segmento, en función de lo que se requiera. El modo segmento divide cada línea en cuatro segmentos, donde cada segmento tiene su propio conector de RF y puede simular hasta cuatro blancos de diferentes direcciones. EL R&S®QAT-B11 puede venir con una línea TX/RX (R&S®QAT-B2) adicional para añadir otras 96 antenas de transmisión y 5 de recepción para simular hasta 8 blancos de diferentes direcciones o dos objetos a lo largo de todo el sistema.
Un mayor offset entre las antenas transmisoras y receptoras significa que el R&S®QAT-B11 no puede cumplir completamente con los requisitos MIMO ya que la señal puede rebotar en diferentes ángulos. El front-end MIMO R&S®QAT-B21 de una sola línea tiene una línea de antenas de recepción y otra de transmisión. Cada antena de transmisión está emparejada con una antena de recepción para cumplir con los requisitos MIMO. Ahora se dispone de 96 antenas de transmisión y 96 de recepción para minimizar los errores de fase y permitir una fácil validación de los radares MIMO con una mejor resolución espacial de eco en tres dimensiones.
Las antenas individuales están separadas 3.7 mm (0.146 pulgadas), mientras que el ancho total de la unidad es de 351 mm (13.818 pulgadas). La configuración puede adaptarse al sensor. El R&S®QAT100 está diseñado para la potencia de transmisión de los radares del sistema ADAS.
El campo de visión (FOV) y la resolución angular alcanzada por el R&S®QAT100 está en función de la configuración y se calcula como sigue:

Tanto la conducción autónoma (AD) como el sistema avanzado de asistencia al conductor (ADAS) son los principales motores de innovación en la industria automotriz. Los sensores radar son una de las tecnologías clave tanto para la AD como para el sistema ADAS y deben probarse para diferentes escenarios, como peatones (un objeto que cruza por delante del automóvil), conducción en la ciudad (conducción hacia un vehículo estacionado o que avanza a menor velocidad), además de viajes entre ciudades o pueblos (parecido a la conducción en la ciudad donde la línea central del vehículo de prueba no se encuentra alineada con el centro del blanco).
Para alcanzar los niveles 4 y 5 del sistema ADAS se necesitan escenarios de prueba de «hardware-in-the-loop» (HIL) y de «vehicle-in-the-loop» (VIL) con funciones más complejas de simulación de blancos. También está aumentando la demanda de simulaciones de radares de banco, así como de ensayos funcionales para acelerar el proceso de validación (fig. 1).




Fig. 1: Niveles de sistemas ADAS y grados de automatización: posibles configuraciones de vehículos
En función de la distancia y de la gama de frecuencias pueden aplicarse los siguientes valores:


Para minimizar la influencia de interferencias externas se proporciona un sistema de apantallamiento adicional perfectamente adecuado para el R&S®QAT100 que proporciona un entorno casi libre de interferencias. El sistema de apantallamiento puede utilizarse tanto en laboratorios, bancos de trabajo o en sistemas de pruebas de vehículos. El sistema de apantallamiento proporciona un entorno libre de multitrayectos y de reflexiones para el radar bajo prueba. Al combinarse con el R&S®QAT100, las antenas planas con una superficie cubierta de absorbente proporcionan un front-end de RF limpio, además suprimen los blancos cercanos, así como las posibles reflexiones multitrayecto (véase fig. 10).
Fig. 10: Kit de montaje y apantallamiento
El sistema de apantallamiento se conecta con el R&S®QAT100 y apantalla los radares de señales externas. Está disponible en diferentes tamaños dependiendo del número de sistemas de antenas de vanguardia conectadas (p.ej. el sistema de apantallamiento R&S®QAT-Z50, el trío de apantallamiento R&S®QAT-Z53).



Hoy en día, los fabricantes de equipos originales y los proveedores de servicios de ingeniería utilizan entornos simulados con sistemas «software-in-the-loop» para probar tanto sensores como módulos de control. Las simulaciones de software son valiosas, pero no pueden reproducir las respuestas tanto en condiciones reales como potencialmente imperfectas de los sensores. Los vehículos completamente autónomos deben lidiar con estas irregularidades. Es necesario probar en carretera todo un sistema integrado en un prototipo o en un vehículo autorizado para circular, debido a que esto permite a los fabricantes de equipos originales validar un producto final antes de introducirlo al mercado. Las pruebas en carreteras son importantes para el proceso de desarrollo, pero por sí solas no son suficientes: tienen un costo elevado, requieren de mucho tiempo, además son difíciles de reproducir.
Es necesario realizar pruebas adicionales a lo largo de toda la cadena de valor añadido de desarrollo de sensores, además de integrar casos de usos sencillos como pruebas tanto de componentes individuales de sensores de radar como de escenarios complejos con múltiples sensores. El objetivo es probar funciones de conducción autónoma como el control de crucero adaptativo (ACC) o los sistemas de frenado de emergencia bajo diversas condiciones de laboratorio (véase fig. 2).

Fig. 2: Proceso de desarrollo de sensores para sistemas ADAS
Tanto la cantidad como los tipos de conexiones a un generador de eco radar están en función de la complejidad de la configuración de prueba. La complejidad de la configuración depende del número de objetos radar que se van a simular, de la cantidad de sistemas de antenas R&S®QAT100 de vanguardia o la cantidad de antenas de recepción (las antenas de recepción siempre reciben señales, pero solo pueden reenviar una señal cuando se conectan a un «backend»).
En función del número de segmentos de antenas que se controlan de manera individual, un generador de eco radar debe tener un número determinado de entradas:



Fig. 11: Variante 1: conecte la señal en transmisión al conector «TX Σ». Todas las antenas de transmisión ahora comparten la misma señal.

Fig. 11: Variante 2: conecte la señal en transmisión del conector «TX A» al conector «TX D». Cada segmento de antena puede ahora transmitir una señal diferente, lo que permite hasta cuatro blancos por línea de TX. Conecte las antenas RX al «RX IF In» del generador de eco radar. En caso de que desee solo una señal de recepción del generador de eco radar, conecte el «RX Select» a un «RX IF In». Para conectar dispositivos externos adicionales como un analizador de espectro, utilice el conector «RX Select».
Para sincronizar las frecuencias de referencia, conecte la referencia de frecuencia (entrada o salida) al generador de eco radar.
Cuando se equipa con la segunda línea R&S®QAT-B2 de 96 antenas de transmisión, el R&S®QAT100 tiene dos líneas con cuatro segmentos independientes cada una, lo que permite a un solo instrumento conectarse con ocho trayectos de FI que se controlan de manera individual. Esto combina a la perfección con los ochos objetos artificiales completamente independientes que fueron simulados por un generador de eco radar para automóviles R&S®AREG800A completamente equipado. Cada trayecto de FI puede dirigirse libremente dentro de un segmento R&S®QAT100.
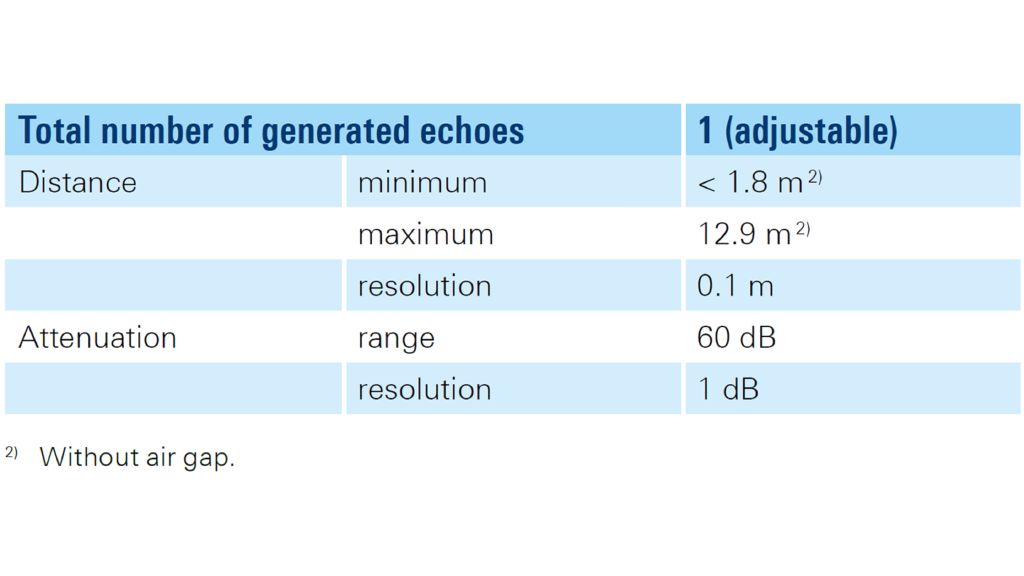
Para simular blancos a una distancia menor, el R&S®QAT100 puede equiparse con un ASDL (analog stepped delay line) para reducir el tiempo de retardo. Esta línea puede simular objetos de radar a distancias muy cortas de 1.8 m a 12.9 m que suponen un desafío para los generadores de eco radar. También permite la utilización independiente del R&S®QAT100. Para probar la resolución angular de su sensor radar, este debe distinguir entre dos blancos a una distancia o un ángulo determinados.
Si se lo combina con un simulador de blancos, el R&S®AREG800A puede emular blancos en movimiento.

Tanto las pruebas realistas como repetibles de los sensores radar suponen un desafío en la cadena de valor añadido de estos:
1) Reducción del ruido de fondo del sensor, así como supresión de blancos cercanos y de posibles reflexiones multitrayecto.
Resumen
Los sistemas autónomos de asistencia a la conducción necesitan urgentemente acceso a datos confiables de alta calidad provenientes de diversos sensores radar para detectar objetos a su alrededor. Tanto las compañías como los proveedores automotrices saben lo complicado que puede resultar probar estos sensores en escenarios de conducción autónoma.
El R&S®QAT100 es el primer sistema completamente direccionable de manera electrónica que estimula los sensores radar en automóviles en el rango de los 76 GHz a los 81 GHz. El concepto modular del R&S®QAT100 permite tanto a los fabricantes de equipos originales para automóviles como a sus socios enfocarse en el desarrollo y pruebas de sistemas ADAS.
Los fabricantes de equipos originales de arquitectura abierta permiten a los proveedores y prestadores de servicios integrar de manera sencilla la plataforma R&S®QAT100 tanto en sistemas comerciales de modelaje 3D como de hardware-in-the-loop, así como en los entornos de simulación y prueba actuales. Es posible realizar pruebas rápidas de sensores radar en automóviles a lo largo de toda la cadena de valor añadido desde simples validaciones de componentes funcionales hasta pruebas de escenarios multiblanco altamente complejas.









