6. Синхронизация измерения
Синхронизация измерения является одним из важнейших аспектов, которые необходимо принимать во внимание при написании приложений дистанционного управления. Несоблюдение этого аспекта приводит к непредсказуемому поведению вашей программы, неповторяемым результатам и множеству отрицательных эмоций. Явным признаком неверной синхронизации измерения является ситуация, когда вам приходится вставлять постоянные паузы в ваше приложение, чтобы запустить его.
Для начала давайте определим понятие синхронизация измеренияв рамках данного раздела:
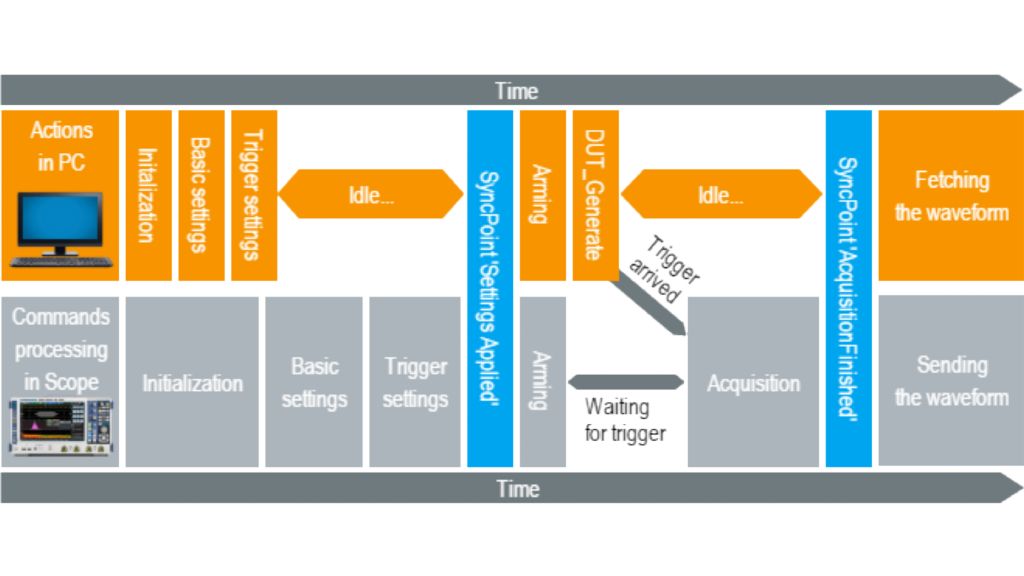
Современные измерительные приборы представляют собой сложные устройства с собственной операционной системой. Ваше измерительное приложение не должно непрерывно контролировать состояние прибора. С помощью синхронизации измерения вы можете гарантировать, что в важных точках вашей программы (SyncPoints, точки синхронизации) ваш прибор находится в ожидаемом состоянии.
Пример синхронизации измерения для осциллографа и испытуемого устройства, генерирующего непериодический сигнал: