課題
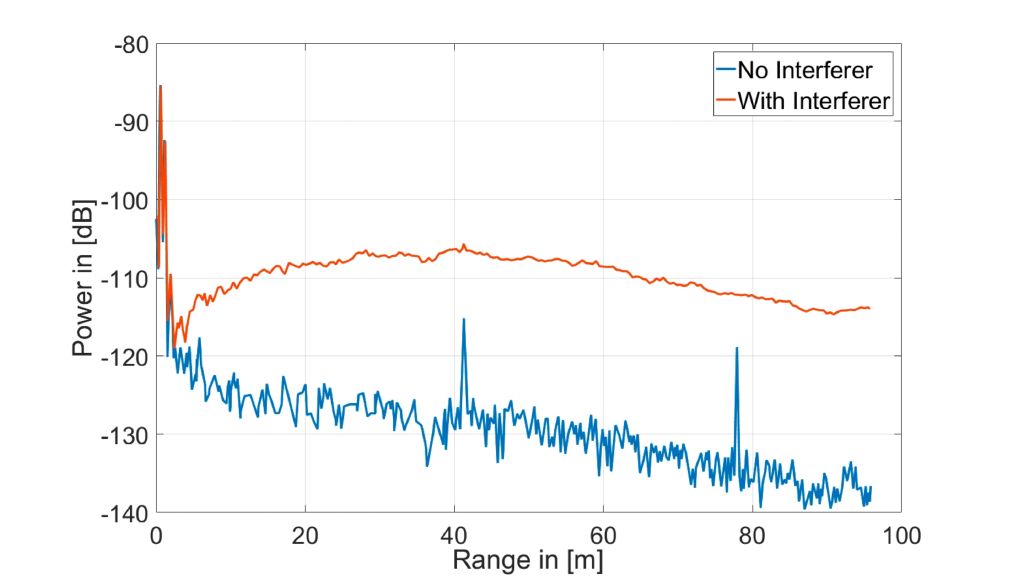
これまで、車載用レーダーセンサの間の相互干渉は重大な問題とは見なされていませんでした。これは、レーダーシステムを搭載した自動車の数がまだ少なかったからです。ところが、小型車、ミドルクラス、上位クラスの自動車へのADASの搭載が進むにつれて、道路上に存在するレーダーセンサの数も増え続けています。さらに、1台の自動車が搭載するレーダーシステムの数も増加しているため、センサの数はさらに増えることになります。例えば、衝突回避システムには、4~6個の短距離レーダーセンサが必要です。物体の実際のエコーの他に干渉信号がレーダーセンサに受信されると、さまざまな問題が発生します。干渉源があると、多くの場合にノイズフロアが上昇します。これにより、歩行者など、発生するエコーの振幅が小さい物体の探知確率が大幅に低下します。このことから、車載用レーダーセンサの干渉低減技術の性能をテストすることが、重要な作業であることがわかります。
車載用レーダーセンサの干渉に対する信頼性(ロバスト性)は安全にとって重要な意味を持つため、標準化機関での取り組みが進んでいます。欧州では、無線機器指令(RED)と、関連する適合標準(ETSI EN 303396、ETSI EN 303091-1/2など)により、義務的規格が法律となりました。この法制化により、レーダーセンサの干渉低減技術の性能テストが義務付けられています。
このことから、車載用レーダーセンサの干渉源に対するイミュニティーがレーダーセンサの主要な性能指標の1つであり、高度に安全なADASを道路上で実現するための前提条件であることがわかります。