Входной каскад с электронным управлением для валидации автомобильных радаров
Первая в мире антенная решетка с полностью электронным управлением
Первая в мире антенная решетка с полностью электронным управлением
Измерительная задача
Системы беспилотного вождения (AD) и продвинутые системы помощи водителю (ADAS) являются движущей силой в развитии автомобилестроительной отрасли. Радиолокационные датчики, которые составляют технологическую основу систем AD и ADAS, должны проходить испытания в различных сценариях, таких как пешеходы (объект, пересекающий дорогу перед автомобилем), городские поездки (движение относительно неподвижных или медленно движущихся автомобилей) и междугородные поездки (аналогично городским поездкам, где центральная линия испытуемого автомобиля не совпадает с центром цели).
Для достижения уровней 4 и 5 в системах ADAS требуются тестовые сценарии «Аппаратные средства в контуре управления» (HIL) и «Автомобиль в контуре управления» (VIL) с расширенными возможностями имитации целей. Кроме того, растет спрос на настольное моделирование радаров и функциональные испытания в целях ускорения процесса валидации (см. рис. 1).


Рис. 1: Уровни ADAS и степень автоматизации: потенциальные конфигурации автомобиля
На сегодняшний день OEM-производители и поставщики услуг проектирования используют имитируемые среды с программно-аппаратным моделированием для испытаний датчиков и модулей управления. Программное моделирование довольно эффективно, однако оно не способно воспроизводить реальные условия и неидеальные ответные реакции датчиков. Полностью автономные транспортные средства должны справляться с этими трудностями. Необходимы дорожные испытания целой интегрированной системы в прототипе или допущенном к эксплуатации автомобиле, поскольку они позволяют OEM-производителям проводить валидацию конечного продукта перед его выпуском на рынок. Дорожные испытания играют важную роль в процессе разработки, однако нельзя ограничиваться только ими, т. к. дорожные испытания требуют значительных затрат времени и средств, а также с трудом поддаются воспроизведению.
На протяжении всей цепочки создания ценности в ходе проектирования радиолокационных датчиков требуются дальнейшие испытания и простые тестовые сценарии. Например, необходимо интегрировать испытания отдельных компонентов датчиков и испытания сложных сценариев с несколькими датчиками. Цель заключается в тестировании функций беспилотного вождения, таких как адаптивный круиз-контроль или системы экстренного торможения, в различных лабораторных условиях (см. рис. 2).
В цепочке создания ценности радиолокационных датчиков сложно обеспечить реалистичные и воспроизводимые испытания:
1) Снижение уровня собственных шумов датчика, а также подавление целей ближнего действия и потенциальных многолучевых отраженных сигналов.
Решение компании Rohde & Schwarz
В имеющихся имитаторах цели используются рупорные антенны в качестве входных каскадов, при этом каждая точка локализует радиолокационные датчики и имитирует горизонтальные и вертикальные позиции путем механического перемещения антенны. Механическая автоматизация замедляет испытания. При каждом перемещении антенны изменяется угол прихода отраженного сигнала, что ведет к ошибкам и снижению точности представления целей, если не проводятся повторные расчеты или калибровка антенн.
Чтобы преодолеть ограничения имеющихся систем и реализовать приобретающие все более важное значение тестовые сценарии HIL и VIL, компания Rohde & Schwarz разработала усовершенствованную антенную решетку R&S®QAT100, которая является первой в мире антенной решеткой с электронным управлением. Антенная решетка R&S®QAT100 имитирует азимут и угол места цели путем активации микрополосковых патч-антенн. Время переключения между антеннами составляет около 2 мс, что позволяет имитировать быстро перемещающиеся по азимуту цели (например, пересекающий поток движения на перекрестках и пешеходных переходах).
Обзор радиолокационных датчиков


Эфирная имитация радаров по азимуту и углу места цели без физического перемещения антенн
Чистая ВЧ-среда без отражений от входного каскада
Печатные антенны имеют значительно меньшую эффективную поверхность рассеяния, чем рупорные антенны со стандартным усилением, которые используются в других системах. Система экранирования R&S®QAT-B50 создает экранированную ВЧ-среду.
Масштабируемое решение
Для имитации окружающей среды радара до 360° можно комбинировать несколько входных каскадов.
Устойчивость к вибрации: идеально подходит для установки на испытательные стенды VIL
1) Область обзора.
Сценарии использования
Благодаря своей модульной конструкции антенная решетка R&S®QAT100 может использоваться в различных сценариях имитации радиолокационных целей.
Испытания компонентов или функций
Всё начинается с очень простых сценариев использования, таких как испытания компонентов одиночного радиолокационного датчика. Здесь проверяются следующие функции радиолокационного датчика: правильное обнаружение отраженного сигнала, способность различать две цели на заданном расстоянии или под заданным углом, а также угловое разрешение датчика.
Испытания на основе сценария
Для проведения испытаний используются различные сценарии, например, сценарии движения с несколькими автомобилями, системами экстренного торможения или адаптивным круиз-контролем. При этом движущиеся цели имитируются по азимуту, диапазону, радиальной скорости и размеру цели. В зависимости от сценария, возможна имитация одного или нескольких датчиков.


Благодаря своей универсальности антенная решетка R&S®QAT100 поддерживает все процессы на протяжении цепочки создания ценности радиолокационных датчиков.
От R&S®QAT100 в качестве автономного устройства для оценки характеристик радиолокационных датчиков в классических настольных схемах на ранних этапах проектирования до приложений HIL и VIL (с имитатором цели в качестве выходного каскада) на уровне модулей радиолокационных датчиков в рамках согласования датчиков со спецификациями OEM-производителей (см. рис. 6).


Стандартный входной каскад R&S®QAT-B11 содержит 96 передающих антенн и 5 принимающих антенн, которые разделены на 4 независимых сегмента. Конфигурация соответствует требованиям к датчикам SIMO. Антенная решетка R&S®QAT100 может работать в линейном или сегментном режиме в зависимости от конкретных требований. Сегментный режим разделяет каждую линию на 4 сегмента. Каждый сегмент имеет отдельный ВЧ-разъем и позволяет имитировать максимум 4 цели из различных направлений. Входной каскад R&S®QAT-B11 может быть оснащен дополнительной линией приема/передачи (R&S®QAT-B2), которая добавляет еще 96 передающих антенн и 5 принимающих антенн для моделирования максимум 8 целей из различных направлений или 2 объектов в масштабах всей решетки.
Ввиду увеличенного смещения между передающими и принимающими антеннами входной каскад R&S®QAT-B11 не полностью отвечает требованиям MIMO, т. к. на него можно воздействовать под различными углами. Однолинейный входной каскад MIMO R&S®QAT-B21 имеет одну линию принимающих антенн и одну линию передающих антенн. Каждая передающая антенна сопряжена с принимающей антенной в соответствии с требованиями MIMO. В результате доступные 96 передающих и 96 принимающих антенн сводят к минимуму фазовые ошибки и позволяют удобно проводить валидацию MIMO-радаров с улучшенным пространственным разрешением для отраженных сигналов в трех измерениях.
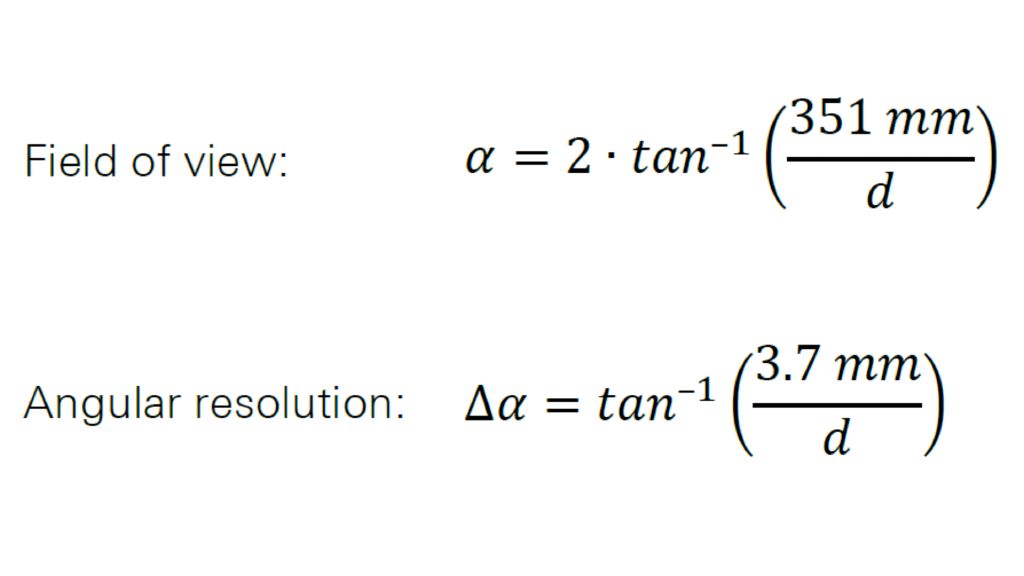
Отдельные антенны расположены на расстоянии 3,7 мм, а общая длина блока составляет 351 мм. Схему установки можно согласовать с особенностями датчика. Антенная решетка R&S®QAT100 рассчитана на типичную мощность передачи радаров в системах ADAS.
Область обзора (FOV) и возможное угловое разрешение R&S®QAT100 зависят от схемы установки и рассчитываются по следующим формулам:

Системы беспилотного вождения (AD) и продвинутые системы помощи водителю (ADAS) являются движущей силой в развитии автомобилестроительной отрасли. Радиолокационные датчики, которые составляют технологическую основу систем AD и ADAS, должны проходить испытания в различных сценариях, таких как пешеходы (объект, пересекающий дорогу перед автомобилем), городские поездки (движение относительно неподвижных или медленно движущихся автомобилей) и междугородные поездки (аналогично городским поездкам, где центральная линия испытуемого автомобиля не совпадает с центром цели).
Для достижения уровней 4 и 5 в системах ADAS требуются тестовые сценарии «Аппаратные средства в контуре управления» (HIL) и «Автомобиль в контуре управления» (VIL) с расширенными возможностями имитации целей. Кроме того, растет спрос на настольное моделирование радаров и функциональные испытания в целях ускорения процесса валидации (см. рис. 1).




Рис. 1: Уровни ADAS и степень автоматизации: потенциальные конфигурации автомобиля
В зависимости от расстояния и диапазона частот применяются следующие значения:


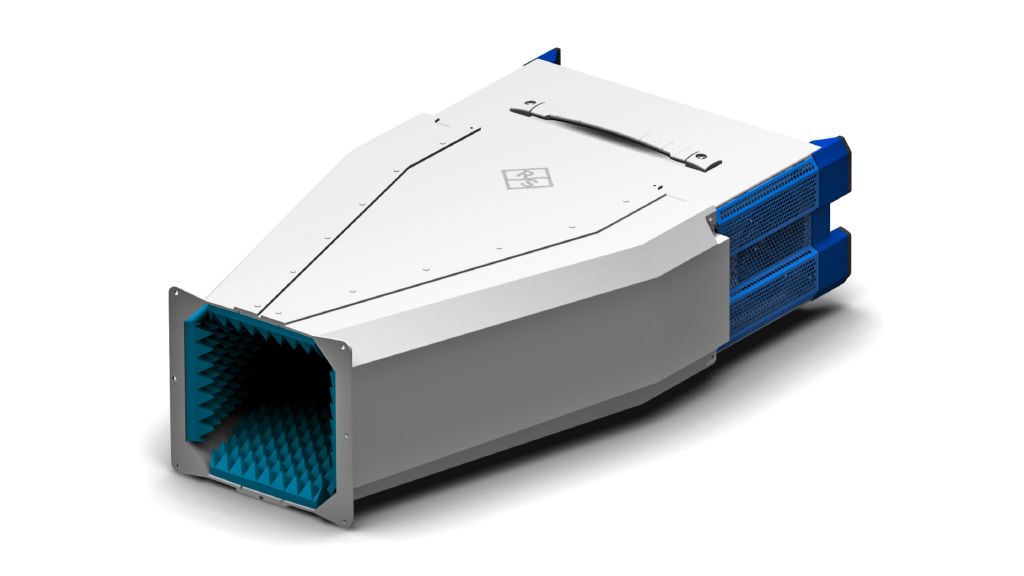
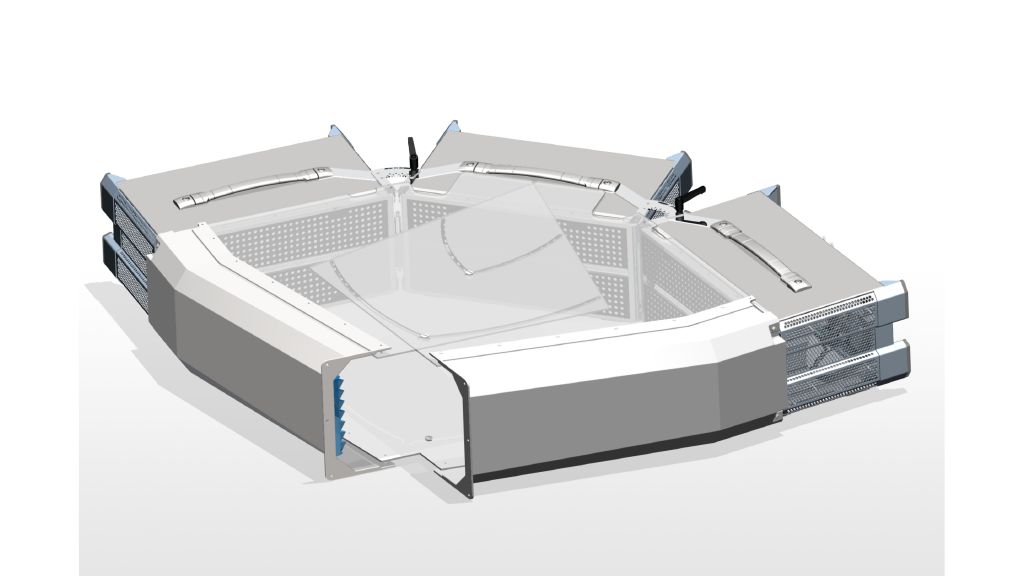
Чтобы свести к минимуму влияние внешних помех, дополнительная система экранирования обеспечивает почти полностью свободную от помех ВЧ-среду, которая идеально подходит для антенной решетки R&S®QAT100. Систему экранирования можно использовать в лабораторных настольных схемах или на стендах для испытаний автомобилей. Экранирование обеспечивает среду без многолучевого распространения сигналов и отраженных сигналов для испытуемого радара. В сочетании с антенной решеткой R&S®QAT100 микрополосковые патч-антенны с поглощающей поверхностью обеспечивают чистый высокочастотный входной каскад, подавляя цели ближнего действия и потенциальные многолучевые отражения (см. рис. 10).
Рис. 10: Набор для экранирования и монтажа
Система экранирования подключается к антенной решетке R&S®QAT100 и защищает радары от внешних сигналов. Предлагаются различные размеры в зависимости от количества подключенных усовершенствованных антенных решеток R&S®QAT100 (например, система экранирования R&S®QAT-Z50, тройная система экранирования R&S®QAT-Z53).



На сегодняшний день OEM-производители и поставщики услуг проектирования используют имитируемые среды с программно-аппаратным моделированием для испытаний датчиков и модулей управления. Программное моделирование довольно эффективно, однако оно не способно воспроизводить реальные условия и неидеальные ответные реакции датчиков. Полностью автономные транспортные средства должны справляться с этими трудностями. Необходимы дорожные испытания целой интегрированной системы в прототипе или допущенном к эксплуатации автомобиле, поскольку они позволяют OEM-производителям проводить валидацию конечного продукта перед его выпуском на рынок. Дорожные испытания играют важную роль в процессе разработки, однако нельзя ограничиваться только ими, т. к. дорожные испытания требуют значительных затрат времени и средств, а также с трудом поддаются воспроизведению.
На протяжении всей цепочки создания ценности в ходе проектирования радиолокационных датчиков требуются дальнейшие испытания и простые тестовые сценарии. Например, необходимо интегрировать испытания отдельных компонентов датчиков и испытания сложных сценариев с несколькими датчиками. Цель заключается в тестировании функций беспилотного вождения, таких как адаптивный круиз-контроль или системы экстренного торможения, в различных лабораторных условиях (см. рис. 2).

Рис. 2: Процесс разработки датчиков ADAS
Количество и типы подключений к генератору отраженных сигналов радаров зависят от сложности испытательной установки. Сложность испытательной установки зависит от количества имитируемых объектов, количества усовершенствованных антенных решеток R&S®QAT100 или количества принимающих антенн (принимающие антенны всегда принимают сигнал, но могут перенаправлять его только при условии, если они подключены к выходному каскаду).
В зависимости от количества независимых антенных сегментов, генератор отраженных сигналов радаров должен иметь определенное количество входов:

 используйте разъем RX Select.")

Рис. 11 — вариант 1: Подключите сигнал передачи к разъему TX ∑. Все передающие антенны совместно используют одинаковый сигнал.
 используйте разъем RX Select.")
Рис. 11 — вариант 2: Подключите сигнал передачи на разъемах TX A – TX D. Теперь каждый антенный сегмент может передавать различный сигнал, поэтому возможны максимум 4 цели на одну линию передачи. Подключите принимающие антенны ко входу RX IF In на генераторе отраженных сигналов радаров. Чтобы использовать только один сигнал приема от генератора отраженных сигналов радаров, подключите разъем RX Select к одному входу RX IF In. Для подключения других внешних устройств (например, анализатора спектра) используйте разъем RX Select.
Для синхронизации опорных частот подключите опорную частоту (вход или выход) к генератору отраженных сигналов радаров.
При наличии второй линии R&S®QAT-B2 из 96 передающих антенн антенная решетка R&S®QAT100 имеет две линии с четырьмя независимыми сегментами в каждой линии, что позволяет подключать один прибор к восьми отдельным трактам промежуточной частоты. Это отлично сочетается с восемью полностью независимыми искусственными объектами, которые можно имитировать с помощью генератора отраженных сигналов автомобильных радаров R&S®AREG800A в полной комплектации. Каждым трактом промежуточной частоты можно отдельно управлять в пределах сегмента R&S®QAT100.
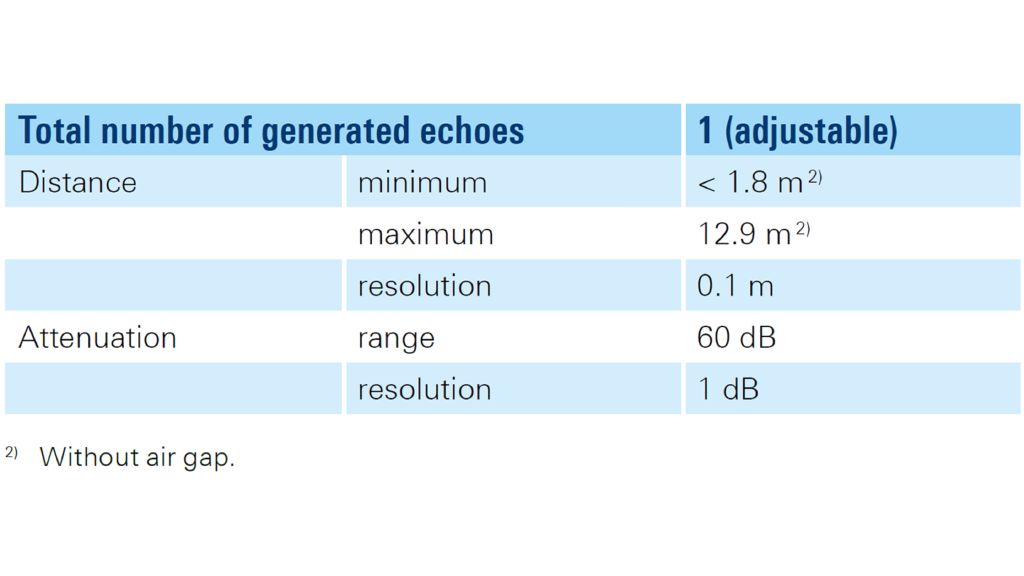
Для имитации объектов на меньшем расстоянии в антенную решетку R&S®QAT100 можно установить аналоговую ступенчатую линию задержки (ASDL), которая уменьшает минимальную линию задержки. Линия ASDL позволяет имитировать радиолокационные цели на очень малых расстояниях от 1,8 м до 12,9 м, которые затруднительны для генераторов отраженных сигналов радаров. В результате также возможно автономное использование антенной решетки R&S®QAT100. Для проверки углового разрешения радиолокационного датчика проверяется способность различать две цели на заданном расстоянии или под заданным углом.
В сочетании с имитатором целей генератор R&S®AREG800A способен имитировать движущиеся цели.

В цепочке создания ценности радиолокационных датчиков сложно обеспечить реалистичные и воспроизводимые испытания:
1) Снижение уровня собственных шумов датчика, а также подавление целей ближнего действия и потенциальных многолучевых отраженных сигналов.
Заключение
Автономные системы помощи водителю нуждаются в надежных и высококачественных данных от различных радиолокационных датчиков, чтобы распознавать находящиеся вблизи автомобиля объекты. Производители автомобилей и поставщики комплектующих знают, насколько сложной процедурой могут быть испытания этих датчиков в сценариях беспилотного вождения.
R&S®QAT100 — это первая антенная решетка с полностью электронным управлением, которая позволяет имитировать автомобильные радары в диапазоне от 76 ГГц до 81 ГГц. Благодаря модульной концепции R&S®QAT100 OEM-производители и их партнеры могут сосредоточить свое внимание на разработке и испытаниях продвинутых систем помощи водителю.
Открытая архитектура позволяет легко интегрировать платформу R&S®QAT100 в коммерческие системы трехмерного моделирования, системы с аппаратными средствами в контуре управления и имеющиеся среды имитации и испытаний. Более быстрые испытания автомобильных радиолокационных датчиков на протяжении всей цепочки создания ценности становятся возможными благодаря простым проверкам функций отдельных компонентов и комплексным испытаниям в сложных сценариях с несколькими целями.











