6. Messsynchronisation
Die Messsynchronisation ist einer der wichtigsten Punkte, die bei der Entwicklung einer Fernsteueranwendung beachtet werden müssen. Bei Vernachlässigung dieses Aspekts Ihres Programms drohen unvorhersehbares Verhalten, Ergebnisse, die sich nicht reproduzieren lassen, und viel Frust. Ein klares Zeichen für eine fehlerhafte Messsynchronisation ist, wenn Ihre Anwendung nur zum Laufen zu bringen ist, indem feste Pausen eingefügt werden.
Klären wir zunächst, was Messsynchronisationim Kontext dieses Kapitels bedeutet:
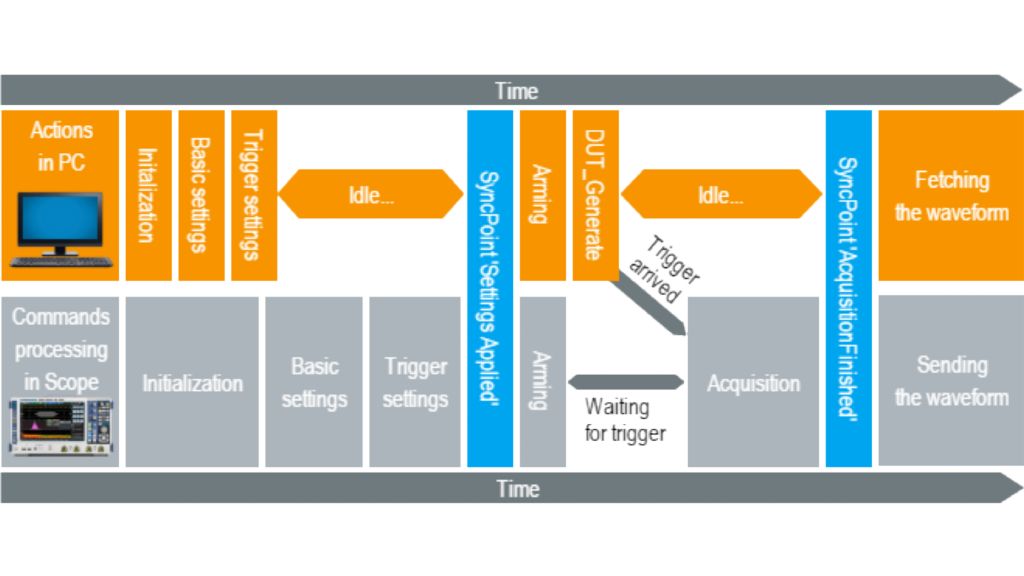
Heutige Messgeräte sind komplexe Systeme mit eigenen Betriebssystemen. Ihre Messapplikation muss sich nicht ständig um den Status des Geräts kümmern. Die Messsynchronisation soll sicherstellen, dass sich Ihr Gerät an wichtigen Punkten des Programms (SyncPoints) wirklich im erwarteten Zustand befindet.
Ein Beispiel für die Messsynchronisation mit einem Oszilloskop und einem Prüfling, der ein nicht-periodisches Signal erzeugt: