6: Sincronización de mediciones
La sincronización de mediciones es uno de los puntos más importantes a tener en cuenta al momento de escribir cualquier aplicación de control remoto. Descuidar este aspecto de su programa genera un comportamiento impredecible de su instrumento, resultados no reproducibles y mucha frustración. Una clara señal de que se ha realizado de manera incorrecta la sincronización de mediciones es, cuando tiene que insertarse pausas fijas en su aplicación para hacerlo funcionar.
Permítanos primeramente definir que es una sincronización de medicionesa efectos de este capítulo:
Los instrumentos de medición actuales son dispositivos complejos con sus propios sistemas operativos. Sus instrumentos de medición no tienen que preocuparse, todo el tiempo, por el estado del instrumento. La sincronización de mediciones es el método por el cual se asegura que, en los puntos importantes de su programa (SyncPoints), su instrumento esté en el estado que se espera.
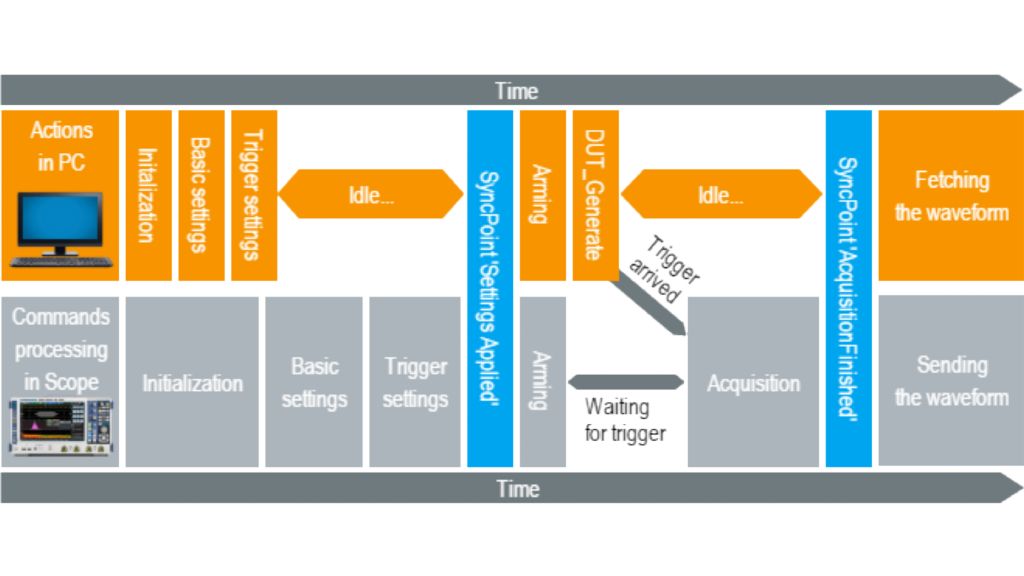
Aquí tenemos un ejemplo de sincronización de mediciones con un osciloscopio y un dispositivo que genera una señal no periódica: